Векторлық басқару (қозғалтқыш) - Vector control (motor) - Wikipedia
Векторлық басқару, деп те аталады өріске бағытталған басқару (FOC), a айнымалы-жиілікті жетегі (VFD) басқару әдісі, онда статор а. ағындары үш фазалы Айнымалы ток электр қозғалтқышы вектормен бейнеленетін екі ортогональды компонент ретінде анықталады. Бір компонент қозғалтқыштың магнит ағынын, екіншісі айналу моментін анықтайды. Жетектің басқару жүйесі дискінің жылдамдығын басқарумен берілген ағымдық және моменттік сілтемелерден тиісті ағымдағы компонент сілтемелерін есептейді. Әдетте пропорционалды-интегралды (PI) контроллерлер токтың өлшенген компоненттерін олардың эталондық мәндерінде ұстау үшін қолданылады. The импульстің енін модуляциялау айнымалы жиіліктік дискінің анықтамасын береді транзистор PI ток контроллерлерінің шығысы болып табылатын статор кернеу сілтемелері бойынша ауыстыру.[1]
FOC бақылау үшін қолданылады Айнымалы синхронды және асинхронды қозғалтқыштар.[2] Ол бастапқыда толықтай бірқалыпты жұмыс жасауы қажет жоғары моторлы қосымшаларға арналған жылдамдық диапазоны, толық генерациясы момент нөлдік жылдамдықта және жылдамдықты қоса алғанда жоғары динамикалық өнімділікке ие үдеу және тежелу. Алайда, FOC моторының өлшеміне, құнына және жұмысына байланысты өнімділігі төмен қосымшалар үшін барған сайын тартымды бола бастайды қуат тұтыну төмендету артықшылығы.[3][4] Микропроцессорлардың есептеу қуаты артқан сайын ол бір айнымалыны әмбебап түрде ығыстырады деп күтілуде скаляр вольт -пер-Герц (V / f) басқару.[5][6]
Даму тарихы

Technische Universität Дармштадттан К.Хассе мен Сименстен Ф.Блашке ізашар болды вектор 1968 жылдан бастап 1970 жылдардың басынан бастап айнымалы ток қозғалтқыштарын басқару. Хассе жанама векторлық бақылауды ұсыну тұрғысынан, Блашке тікелей векторлық басқаруды ұсыну тұрғысынан.[7][8] Брауншвейг техникалық университетінің Вернер Леонхард ФОК техникасын одан әрі дамытып, мүмкіндіктер ашуда маңызды рөл атқарды Айнымалы ток жетектері бәсекеге қабілетті балама болу Тұрақты ток жетектері.[9][10]
Коммерциализациядан кейін ғана микропроцессорлар, яғни 1980 жылдардың басында жалпы мақсаттағы айнымалы ток жетектері қол жетімді болды.[11][12] Айнымалы ток жетектеріне арналған FOC пайдалану кедергілері тұрақты шығындармен салыстырғанда жоғары шығындар мен күрделілік пен қызмет ету қабілеттіліктің төмендеуін қамтыды, ал ФОК осы уақытқа дейін датчиктер, күшейткіштер және басқалары бойынша көптеген электрондық компоненттерді қажет етеді.[13]
The Саябақты трансформациялау талдауда және зерттеуде бұрыннан кеңінен қолданылып келеді синхронды және индукциялық машиналар. Трансформация ФОК-тың қалай жұмыс істейтінін түсіну үшін қажет ең маңызды тұжырымдама болып табылады, бұл тұжырымдама алғаш рет 1929 жылы жазылған мақалада тұжырымдалған. Роберт Х.Парк.[14] Парктің мақаласы ХХ ғасырда жарық көрген барлық энергетикамен байланысты құжаттардың ішіндегі әсері жағынан екінші орынға ие болды. Парк жұмысының жаңалығы оның кез-келген байланысты машинаның сызықтық түрлендіруге қабілеттілігін қамтиды дифференциалдық теңдеу коэффициенттері уақыт бойынша өзгеріп отыратын екіншісіне өзгермейтін коэффициенттер.[15]
Техникалық шолу
Негізгі бәсекелес VFD басқару платформаларына шолу:
| VFD, сенсоры бар немесе сенсорсыз |
| |||||||||||||||||||||||||||
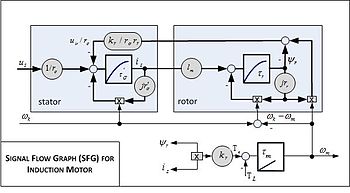



Айнымалы ток жетегінің басқару элементтерін талдауға техникалық тұрғыдан қатысы болуы мүмкін («Сондай-ақ» бөлімін қараңыз), мұндай талдау әрдайым ілеспе сызықтар бойымен қозғалатын қозғалтқыш тізбегін модельдеуден басталады. сигнал ағынының графигі және теңдеулер.[19]
Векторлық басқаруда айнымалы ток индукциясы немесе синхронды қозғалтқыш барлық жұмыс жағдайында бөлек басқарылады қуанышты Тұрақты қозғалтқыш.[21] Яғни, айнымалы ток қозғалтқышы тұрақты ток қозғалтқышы сияқты жұмыс істейді өріс ағынының байланысы және арматура сәйкес өріс және арматура (немесе крутящий компонент) токтарымен құрылған ағын байланысы ортогоналды момент басқарылатын кезде өріс ағынының байланысына әсер етпейтін, осылайша моменттің динамикалық реакциясына мүмкіндік беретін етіп тураланған.
Векторлық басқару сәйкесінше үш фаза тудырады PWM а қозғалтқышының кернеуі а күрделі мотордың үш фазалы статор тогынан түсетін күрделі ток векторын басқаруға арналған кернеу векторы проекциялар немесе айналу үш фазалық жылдамдық пен уақытқа тәуелді жүйе мен осы векторлардың айналмалы анықтамалық фреймінің арасындағы алға-артқаүйлестіру уақыт инвариантты жүйесі.[22]
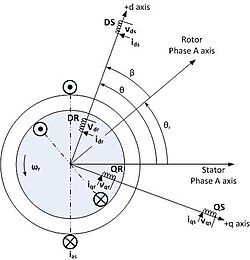
Мұндай кешен статор ағымдағы кеңістіктің векторын d (q) және к (квадратура) осьтері бойынша ортогоналды компоненттері бар координаталар жүйесінде анықтауға болады, осылайша токтың өріс ағынының байланыстырушы компоненті d осі бойымен тураланады және токтың моменттік компоненті тураланады q осі бойымен.[21] Асинхронды қозғалтқыштың (d, q) координаттар жүйесін қозғалтқыштың лездік (a, b, c) үш фазалы қабатына қосуға болады синусоидалы ілеспе суретте көрсетілгендей жүйе (айқындық үшін көрсетілмеген b & c фазалары). (D, q) жүйелік ток векторының компоненттері пропорционалды және интегралды немесе сияқты дәстүрлі басқаруға мүмкіндік береді PI, бақылау, тұрақты ток қозғалтқышындағы сияқты.
(D, q) координаталар жүйесімен байланысты проекцияларға әдетте мыналар кіреді:[19][22][23]
- Лездік токтардан (a, b, c) комплексіне қарай проекциялау статор үш фазалы кеңістіктің векторлық көрінісі синусоидалы жүйе.
- Үштен екі фазаға бағыттау, (a, b, c) -to- (,) көмегімен проекция Кларк трансформация. Әдетте векторлық басқаруды теңдестірілген үшфазалы токтармен жерлендірілмеген қозғалтқыш қабылдайды, сондықтан қозғалтқыштың тек екі фазасын сезіну керек. Сондай-ақ, екіден үшке дейінгі фаза, (,) -to- (a, b, c) проекциясы кеңістіктік векторлы PWM модуляторын немесе кері Кларк түрлендіруін және басқа PWM модуляторларының бірін қолданады.
- Алға және артқа екі-екі фаза, (,) -то- (d, q) және (d, q) -то- (,) сәйкесінше парк пен кері парк түрлендірулерін қолданатын проекциялар.


Алайда, үш-екі, (а, б, с) -то- (г, q) және кері проекцияларды қолдану көздері үшін сирек емес.
(D, q) координаттар жүйесінің айналуын кез-келген жылдамдыққа ерікті түрде орнатуға болатын кезде, үш жылдамдық немесе анықтамалық кадрлар бар:[16]
- (D, q) координаталар жүйесі айналмайтын стационарлық санақ жүйесі;
- (D, q) координаттар жүйесі синхронды жылдамдықпен айналатын синхронды айналатын сілтеме жүйесі;
- (D, q) координаталар жүйесі ротор жылдамдығымен айналатын ротордың санақ жүйесі.
Бөлінген айналу моменті мен өріс токтарын алгоритмді басқаруға арналған шикізат статорының ток кірістерінен алуға болады.[24]
Тұрақты ток қозғалтқыштарындағы магнит өрісі мен крутящий моменттері тиісті өрісті және арматура токтарын бөлек басқару арқылы салыстырмалы түрде қарапайым жұмыс істей алады, айнымалы жылдамдықтағы айнымалы ток қозғалтқыштарын үнемді басқару микропроцессорлық басқаруды дамытуды қажет етеді[24] қазір қуатты DSP қолданыстағы барлық айнымалы ток дискілерімен (цифрлық сигналды өңдеу ) технология.[25]
Инверторлар кез-келген түрінде іске асырылуы мүмкін ашық цикл сенсорсыз немесе тұйықталған ФОК, ашық контурлық жұмыстың негізгі шектеуі 100% крутящий момент кезінде мүмкін болатын минималды жылдамдық, яғни тұйықталған жұмыс үшін тоқтап тұрғанмен салыстырғанда шамамен 0,8 Гц.[9]
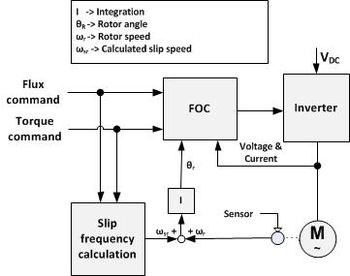
Векторлық басқарудың екі әдісі бар, тікелей немесе кері байланыс векторлық басқару (DFOC) және жанама немесе тамақтандыру векторлық бақылау (IFOC), IFOC көбінесе қолданылады, өйткені тұйықталған режимде мұндай диск жетектері жылдамдықтың нөлдік жылдамдығынан өрістің әлсіреуіне дейінгі жылдамдық аралығында оңай жұмыс істейді.[26] DFOC кезінде ағынның шамасы мен бұрыштық кері байланыс сигналдары кернеу немесе ток модельдері деп аталатын тікелей есептеледі. IFOC-те ағынның кеңістігі бұрышы және ағынның шамасы сигналдары алдымен статор токтарын өлшейді ротор ротордың айналу жылдамдығына сәйкес ротордың бұрышын және есептелген эталондық мәнін қосу арқылы ағын кеңістігінің бұрышын алу үшін жылдамдық сырғанау сырғанау жиілігіне сәйкес келетін бұрыш.[27][28]
Айнымалы ток жетектерінің сенсорсыз басқарылуы (Sensorless FOC блок-сызбасын қараңыз) құны мен сенімділігі үшін тартымды. Сенсорсыз басқару ротордың жылдамдығы туралы ақпаратты өлшенген статор кернеуі мен токтардан ашық контурлы бағалаушылармен немесе тұйық контурлық бақылаушылармен бірге шығаруды талап етеді.[19][20]
Қолдану
1. Статор фазасының токтары өлшенеді, (a, b, c) координаттар жүйесіндегі күрделі кеңістік векторына айналады.
2. Ағым (, ) координаттар жүйесі. Координаттар жүйесіне айналды ішіне айналу ротор анықтамалық жақтау, ротордың позициясы алынған интеграциялау жылдамдығы жылдамдықты өлшеу сенсор.
3. Ротор ағын байланысы вектор магниттейтін L индуктивтілігімен статор тогының векторын көбейту арқылы бағаланадым және төмен жылдамдықты сүзу ротордың нәтижесі уақыт тұрақты Lр/ Rр, атап айтқанда, ротордың индуктивтілігі мен ротордың кедергі қатынасына.
4. Ағымдағы вектор (d, q) координаттар жүйесіне айналады.
5. Статор тогы векторының d-осі компоненті ротор ағынының байланысын басқаруға, ал q осінің ойдан шығарылған бөлігі қозғалтқыш моментін басқаруға арналған. Осы токтарды басқару үшін PI контроллері қолданыла алады, жарылыс ағымдағы басқару түрі динамикалық өнімділікті жақсартады.
6. PI контроллері координаталық кернеу компоненттерін (d, q) қамтамасыз етеді. Кейде контроллердің шығысына айқасу термині қосылады, бұл айқасқан муфтаны немесе жылдамдықтың, токтың және ағынның байланысының үлкен және жылдам өзгеруін азайту үшін басқару өнімділігін арттыру. PI-контроллерге кейде қажет болады төмен жылдамдықты сүзу транзисторлық коммутацияның шамадан тыс күшейтілуіне және басқарудың тұрақсыздығына байланысты токтың толқынының алдын алу үшін кіріс немесе шығыс кезінде. Алайда, мұндай сүзгілеу динамикалық басқару жүйесінің жұмысын шектейді. Серводискілер сияқты өнімділігі жоғары жетектерге арналған сүзгілеу талаптарын азайту үшін жоғары коммутация жиілігі (әдетте 10 кГц-тен жоғары) қажет.
7. Кернеу компоненттері (d, q) координаталар жүйесінен (, ) координаттар жүйесі.
8. Кернеу компоненттері (, ) координаттар жүйесі (a, b, c) координаттар жүйесіне немесе берілген Импульстің енін модуляциялау (PWM) модулятор немесе екеуі де, қуат инверторы бөліміне сигнал беруге арналған.
Векторлық бақылауды қолданудың маңызды аспектілері:
- Жылдамдықты немесе позицияны өлшеу немесе қандай да бір бағалау қажет.
- Сілтемелерді өзгерту арқылы айналу моменті мен ағыны 5-10 миллисекундтан аз уақытта жылдам өзгертілуі мүмкін.
- The қадамдық жауап кейбіреулері бар қайта қарау егер PI бақылауы қолданылса.
- Транзисторлардың ауысу жиілігі әдетте тұрақты және модулятормен белгіленеді.
- Моменттің дәлдігі басқару кезінде қолданылатын қозғалтқыш параметрлерінің дәлдігіне байланысты. Мысалы, ротор температурасының өзгеруіне байланысты үлкен қателіктер жиі кездеседі.
- Процессордың ақылға қонымды өнімділігі қажет; әдетте басқару алгоритмі әр PWM циклі бойынша есептеледі.
Векторлық басқару алгоритмі қарағанда күрделі болғанымен Моментті тікелей басқару (DTC), алгоритмді DTC алгоритмі сияқты жиі есептеудің қажеті жоқ. Сондай-ақ, қазіргі датчиктер нарықтағы ең жақсы болуы керек емес. Осылайша, процессордың және басқа басқару аппаратурасының құны төмен, оны DTC-нің максималды өнімділігі қажет емес қосымшалар үшін қолданады.
Сондай-ақ қараңыз
- түрлендіру
- Адаптивті басқару
- Инженерлік басқару
- Басқару теориясы
- Dqo трансформациясы
- Меншікті мәндер және меншікті векторлар
- Кеңейтілген Kalman сүзгісі
- Сүзгі (сигналды өңдеу)
- Жиілік реакциясы
- Гильберт түрлендіру
- Импульсті жауап
- Калман сүзгісі
- Қуатты басқару
- Тамыр локусы
- Пербуртация теориясы
- Сигнал-ағын графигі
- Шағын сигнал моделі
- Сырғымалы режимді басқару
- Мемлекеттік бақылаушы
- Мемлекеттік кеңістікті ұсыну
- Симметриялық компоненттер
- Жүйелік талдау
- Уақытша жауап
- Тасымалдау функциясы

Әдебиеттер тізімі
- ^ Замбада, Хорхе (8 қараша, 2007). «Қозғалтқыштарды өріске бағытталған басқару». MachineDesign.com. Архивтелген түпнұсқа 2013 жылғы 16 ақпанда.
- ^ Левин, Чак (10 сәуір, 2006). «Коммутация және қозғалтқышты басқару әдістеріндегі жаңа әзірлемелер». DesignNews.com. Архивтелген түпнұсқа 2007 жылы 21 маусымда. Алынған 22 сәуір, 2012.
- ^ а б 568000 DSP нұсқаулығы (2007). «3 фазалы айнымалы токты индукциялық векторлық басқару дискісі және бір шунтты ток сезгіштігі» (PDF). Ақысыз. б. 25, қоса esp. экв. 2–37. Алынған 16 мамыр, 2012.
- ^ Годболе, Кедар (2006 ж. 23 қыркүйек). «Өріске бағытталған басқару қозғалтқыштың көлемін, өндірістік шығындарда шығындар мен қуат тұтынуды азайтады». Texas Instruments.
- ^ Bose, Bimal K. (маусым 2009). «Энергетикалық электрониканың өткені, бүгіні және болашағы». IEEE Industrial Electronics журналы. 3 (2): 11. дои:10.1109 / MIE.2009.932709.
- ^ Мюррей, Эйнгус (2007 ж. 27 қыркүйек). «Қозғалысты түрлендіру: Айнымалы қозғалтқыштарды өріске бағытталған басқару». EDN. Алынған 9 мамыр 2017.
- ^ Яно, Масао; т.б. «Жапониядағы мотор жетектеріне арналған энергетикалық электроника тарихы» (PDF). б. 6, сурет 13. Алынған 18 сәуір 2012.
- ^ Рафик, Абд Абд (2006). «Адаптивті нейрондық интегратормен асинхронды қозғалтқыш жетекшісінің өріске бағдарланған жылдамдығы». Ыстамбұл университетінің электротехника және электроника инж. 6 (2): 229.
- ^ а б c Друри, Билл (2009). Басқару әдістері және басқару элементтері туралы анықтамалық (2-ші басылым). Стивенэйдж, Хертс, Ұлыбритания: Инженерлік-технологиялық институт. б. ххх. ISBN 978-1-84919-101-2.
- ^ Bose, Bimal K. (2006). Қуатты электроника және мотор жетектері: жетістіктер мен тенденциялар. Амстердам: академиялық. б. 22. ISBN 978-0-12-088405-6.
- ^ «Векторлық басқару дискісін дамыту».
- ^ Бозе (2006), б. 605
- ^ Габриэль, Р .; Леонхард, В .; Нордби, Калифорния (1980 - наурыз - сәуір). «Микропроцессорларды қолдана отырып, айнымалы токтың стандартты қозғалтқыштарын өріске бағытталған басқару». Транс. Өнеркәсіптік қосымшалар туралы. IA-16 (2): 188. дои:10.1109 / tia.1980.4503770. S2CID 14562471.
- ^ Парк, Роберт (1929). «Синхронды машиналардың екі реакциялық теориясы». Транс. AIEE. 48: 716–730. дои:10.1109 / t-aiee.1929.5055275. S2CID 51643456.
- ^ Хейдт, Г. Т .; Венката, С.С .; Балижепалли, Н. (23-24 қазан, 2000). «Энергетика саласындағы жоғары әсерлі құжаттар, 1900-1999» (PDF). Солтүстік Американың қуат симпозиумы (NAPS) 2000 ж: P-1-P-7. Алынған 23 мамыр, 2012.
- ^ а б Ли, Р. Дж .; Пиллай, П .; Harley R. G. (1984). «Индукциялық қозғалтқыштарды модельдеуге арналған D, Q анықтамалық шеңберлері» (PDF). Электр энергетикалық жүйелерін зерттеу. EPR. 8: 15–26. дои:10.1016/0378-7796(84)90030-0.
- ^ Росс, Дэйв; т.б. (2004). «ACSIM-ді векторлық басқару үшін dsPIC30F қолдану» (PDF). Микрочип. Алынған 16 мамыр, 2012.
- ^ Попеску, Мирче (2000). Индукциялық қозғалтқышты векторлық басқару мақсатында модельдеу (PDF). Espoo: Хельсинки технологиялық университеті. 13-14 бет. ISBN 951-22-5219-8.
- ^ а б c г. Holtz, J. (тамыз 2002). «Асинхронды қозғалтқыш жетектерін сенсорсыз басқару» (PDF). IEEE материалдары. 90 (8): 1359–1394. дои:10.1109 / jproc.2002.800726. Алынған 3 маусым, 2012.
- ^ а б Замбада, Хорхе. «FOC сенсорсыз қозғалтқышты басқарудың артықшылықтары». Құрылғылар журналы. Алынған 3 маусым, 2012.
- ^ а б Бозе (2006), б. 429
- ^ а б TI (1997). «3 фазалы айнымалы ток қозғалтқыштарын өріске бағытталған басқару» (PDF). TI.
- ^ Дидье, Жан-Луи. «Fortescue, Clarke, Park et Ku triphasés transformations des systèmes triphasés». Архивтелген түпнұсқа 2014 жылғы 7 сәуірде. Алынған 4 маусым, 2012.
- ^ а б Синха, Нареш Кумар (1986). Микропроцессорлық басқару жүйелері. D. Reidel баспасы. 161 & 175 бет. ISBN 90-277-2287-0.
- ^ Бозе (2006), б. 474
- ^ Бозе (2006), 419, 474 б
- ^ Бозе (2006), б. 423-425
- ^ Dong, Gan (желтоқсан 2007). «Сенсорсыз және тиімділікті оңтайландырылған индукциялық машинаны басқару, ассоциацияланған конвертер PWM модуляция схемаларымен» (PDF). Теннеси технологиялық университеті. б. 10. Алынған 16 мамыр, 2012.