Релуктивті қозғалтқыш - Switched reluctance motor
The релуктивті қозғалтқыш (SRM) - электр қозғалтқышы құлықсыздық момент. Жалпыға қарағанда щеткаланған тұрақты ток қозғалтқышы түрлері, қуаты жеткізіледі орамалар ішінде статор емес, (жағдай) ротор. Бұл механикалық дизайнды едәуір жеңілдетеді, себебі электр қуатын қозғалатын бөлікке жеткізу қажет емес, бірақ электрлік дизайнды қиындатады, өйткені әртүрлі орамаларға қуат беру үшін қандай да бір коммутациялық жүйені қолдану қажет. Электрондық құрылғылар SRM конфигурацияларын жеңілдететін уақытты дәл ауыстыра алады. Оның басты кемшілігі айналу моменті.[1] Төмен жылдамдықта айналу моментін шектейтін контроллер технологиясы көрсетілген.[2] Түрі екендігі туралы ақпарат көздері келіспейді қадамдық қозғалтқыш әлде жоқ па.[3]
Бірдей механикалық конструкцияны балама пайдалану генератор ретінде қолданылады. Жүктеме ток ағынының айналуымен синхрондалуы үшін катушкаларға ретімен ауыстырылады. Мұндай генераторларды әдеттегі типтерге қарағанда әлдеқайда жоғары жылдамдықпен басқаруға болады, өйткені якорь магниттелетін материалдың бір бөлігі ретінде, ойық тәрізді цилиндр түрінде жасалуы мүмкін.[4] Бұл жағдайда SRM аббревиатурасы ауыстырылған ауытқу машинасы (SRG, ауыстырылған релюанс генераторымен бірге) мағынасына дейін кеңейтіледі. Қозғалтқыш және генератор болып табылатын топология негізгі қозғалтқышты іске қосу үшін пайдалы, өйткені ол арнайы стартер қозғалтқышын үнемдейді.
Тарих
Қозғалтқыш түріне алғашқы патент 1838 жылы АҚШ-та В.Х.Тейлор болды[5][6].
SR дискілерінің принциптері 1970 жылдары сипатталған,[7] және жетілдірілген Питер Лоренсон және басқалары 1980 жылдан бастап.[8] Сол кезде кейбір сарапшылар технологияны мүмкін емес деп санады,[9] және практикалық қолдану шектеулі болды, бұл ішінара бақылау мәселелеріне байланысты және қолдануға жарамсыз, сондықтан төмен өндірістік сандар жоғары шығындарға әкеледі.[10][1][11]
Жұмыс принципі
SRM-де а-дағы сияқты өрісті өрістер бар Тұрақты қозғалтқыш статор орамдары үшін. Роторда магниттер немесе катушкалар бекітілмеген. Бұл жұмсақ магнитті материалдан (көбінесе ламинатталған болаттан) жасалған қатты айқын полюсті ротор (проекциялық магниттік полюстері бар). Қуат статор орамаларына түскен кезде ротордың магниттік құлықсыздық ротордың полюсін ең жақын статор полюсімен туралауға тырысатын күш жасайды. Айналуды ұстап тұру үшін электронды басқару жүйесі статордың магнит өрісі ротордың полюсін алға қарай тарта отырып, «жетелейтін» етіп дәйекті статор полюстерінің орамдарын қосады. Механиканы қолданғаннан гөрі коммутатор дәстүрлі қозғалтқыштардағыдай орамдық токты ауыстыру үшін коммутациялық-релуктивті қозғалтқыш ротор білігінің бұрышын анықтау үшін электронды позиция датчигін пайдаланады және қатты күй импульстік уақыт пен қалыптауды динамикалық басқаруға мүмкіндік беретін статор орамдарын ауыстыруға арналған электроника. Бұл ұқсас қарағанда ерекшеленеді асинхронды қозғалтқыш сонымен қатар орамдарды айналмалы фазалық реттілікпен қуаттайды. SRM-де ротордың магниттелуі статикалық болады (асинхронды қозғалтқыш жылжытылған кезде синхронды жылдамдыққа қарағанда аз қозғалады) қозғалтқыш айналған кезде «айқын« солтүстік »полюсі қалады». SRM-де сырғудың болмауы ротордың орналасуын дәл білуге мүмкіндік береді, бұл қозғалтқышты ерікті түрде баяу басуға мүмкіндік береді.
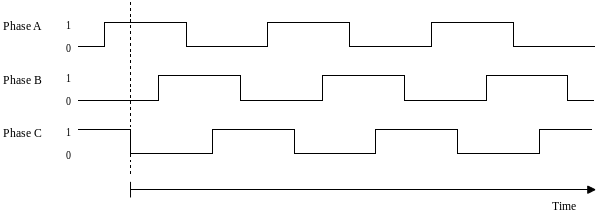
Қарапайым коммутация
Егер A0 және A1 полюстеріне қуат берілсе, онда ротор осы полюстерге сәйкес келеді. Бұл орын алғаннан кейін, B0 және B1 статор полюстеріне қуат берілмей тұрып, статор полюстерін қуаттан босатуға болады. Енді ротор статор полюстерінде орналасқан b. Бұл кезек басталғанға дейін с дейін жалғасады. Бұл реттілікті кері бағытта қозғалысқа жету үшін де өзгертуге болады. Жоғары жүктемелер және / немесе жоғары үдеу бұл реттілікті тұрақсыздандыруы мүмкін, бұл адымның жіберілуіне әкелуі мүмкін, өйткені ротор бұрыс бұрышқа секіреді, мүмкін үш алға емес, бір қадам артқа шегініп кетеді.

Квадратура
Біршама тұрақты жүйені «квадратура» дәйектілігін қолдану арқылы табуға болады. Кез-келген уақытта екі катушка қуат алады, Біріншіден, статор полюстері A0 және A1 қуат алады. Содан кейін В0 және В1 статор полюстері қуатталады, олар роторды А мен В аралығында туралайтындай етіп тартады, содан кейін А статор полюстері қуаттан босатылады және ротор В-мен тураласады. Толық айналуды аяқтау үшін C және CA. Қарама-қарсы бағыттағы қозғалысқа жету үшін бұл реттілікті өзгертуге болады. Магниттелуі бірдей позициялар арасындағы көбірек қадамдар, сондықтан жіберіп алынған қадамдардың басталуы жоғары жылдамдықтарда немесе жүктемелерде пайда болады.
Неғұрлым тұрақты жұмысынан басқа, бұл тәсіл а жұмыс циклі қарапайым фазадағыдай 1/3 емес, әр фазаның 1/2 бөлігі.
Бақылау
Басқару жүйесі қуат тізбегіне қажетті дәйекті импульстерді беруге жауапты. Мұны коммутаторлар немесе қарапайым аналогтық немесе сандық уақыт тізбектері сияқты электромеханикалық құралдарды қолдану арқылы жасауға болады.
Көптеген контроллерлер кіреді бағдарламаланатын логикалық контроллерлер (PLC) электромеханикалық компоненттерден гөрі. Микроконтроллерді фаза активациясының дәл уақытын қосу үшін пайдалануға болады. Бұл сонымен қатар а жұмсақ бастау Қажетті аппараттық құралдар көлемін азайту үшін бағдарламалық жасақтама түрінде жұмыс істеу. A кері байланыс басқару жүйесін жетілдіреді.[1]
Электр тізбегі

Ауыстырылған релукционды қозғалтқышты электрмен жабдықтаудың ең көп тараған тәсілі асимметриялық көпір түрлендіргішін қолдану болып табылады. Ауыстыру жиілігі айнымалы ток қозғалтқыштарына қарағанда 10 есе төмен болуы мүмкін.[3]
Асимметриялық көпір түрлендіргішіндегі фазалар коммутацияланған релукционды қозғалтқыштың фазаларына сәйкес келеді. Егер фазаның екі жағындағы қуат қосқыштарының екеуі де қосылса, онда тиісті фаза іске қосылады. Ток белгіленген мәннен жоғары көтерілгеннен кейін қосқыш өшеді. Қозғалтқыш орамында жинақталған энергия осы қуат таусылғанға дейін токты сол бағытта ұстайды.

Бұл схема өзгертілуі мүмкін, сондықтан схема бірдей әрекетті орындайтынына қарамастан, аз компоненттер қажет болады. Бұл тиімді схема (n + 1) қосқыш және диодтың конфигурациясы ретінде белгілі.
A конденсатор, кез-келген конфигурацияда электр қуатының және акустикалық шудың кернеудің ауытқуын шектеу арқылы басу үшін қолданылады.
Егер фаза ажыратылса, SR қозғалтқышы жұмысын жалғастыра беруі мүмкін Айнымалы токтың асинхронды қозғалтқышынан айырмашылығы төмен моментте.[7][12]
Қолданбалар
SRM кейбір құрылғыларда қолданылады[13] және көлік құралдары.[14]
Әдебиеттер тізімі
- ^ а б c Бартос, Франк (2003 ж., 1 ақпан). «Ауыстырылатын-релактивті қозғалтқыштарға арналған көктем мезгілі?». Инженерлік басқару. Мұрағатталды түпнұсқадан 2020 жылғы 19 мамырда.
Цифрлық сигналдық процессорлар және SR басқаруындағы арнайы алгоритмдер ротор мен статордың жағдайына қатысты қозғалтқыш орамаларына берілетін ток импульстері үшін өте маңызды. SR технологиясы нақты жетістіктерге жете алмады. SR технологиясына деген қызығушылықтың төмендеуі
- ^ Станкович, А.М. «Electr. & Comput. Eng.». дои:10.1109 / IAS.1996.557001. Журналға сілтеме жасау қажет
| журнал =(Көмектесіңдер) - ^ а б Бартос, Франк (1 наурыз 2010). «SR қозғалтқыштары, дискілер үшін қалпына келтіру?». Инженерлік басқару. Мұрағатталды түпнұсқадан 2020 жылғы 19 мамырда.
SR жетектері ауыспалы жиілікте жұмыс істейді, салыстырмалы айнымалы диск жетектеріне қарағанда әдетте 10 есе төмен. Кейбір басқа көздер екі қозғалтқышты да бір санатқа жатқызады.) Эмотерон қазіргі SR қозғалтқышы баспалдақ қозғалтқышы емес, өйткені ток ротордың бұрыштық күйіне қатысты үздіксіз бақыланады және бақыланады.
- ^ «Ауытқу генераторлары және оларды басқару». Түпнұсқадан мұрағатталды 2014-11-29. Алынған 2016-11-18.CS1 maint: BOT: түпнұсқа-url күйі белгісіз (сілтеме)
- ^ «ӨШІРІЛГЕН ҚҰРЫЛЫС МАШИНАСЫ ТАРИХЫ (электр қозғалтқышы)». what-when-how.com. Алынған 2020-07-25.
- ^ «Зарядталған электр қуаты | Коммутацияланған релукционды қозғалтқыштарды мұқият қарау». chargeevs.com. Алынған 2020-07-25.
- ^ а б Бартос, Франк (10 наурыз 2010). «SR қозғалтқышының анатомиясы: Ауыстырылған релукционды қозғалтқыштардың ішін қараңыз». Инженерлік басқару. Мұрағатталды түпнұсқасынан 2018-10-27 ж.
- ^ «Айнымалы жылдамдықты коммутацияланған релукционды қозғалтқыштар», П.Ж. Лоуренсон, Дж.М. Стивенсон, П.Т. Бленкинсоп, Дж. Корда және Н.Н. Фултон, IEE Proceedings B - Электр энергиясына арналған қосымшалар, 127 том, 4-шығарылым, 1980. 253-265 бет.
- ^ «IEEE Эдисон медалінің алушылары». www.ieee.org. Мұрағатталды түпнұсқадан 2020 жылғы 19 мамырда.
- ^ Бартос, Франк (1 қараша 1999). "'SR технологиясымен өткенге «. Инженерлік басқару. Мұрағатталды түпнұсқадан 2020 жылғы 19 мамырда.
- ^ Бартос, Франк (2003 ж. 30 мамыр). «Ауыстырылған-релактикалық қозғалтқыштар мен басқару элементтері балама шешім ұсынады». Инженерлік басқару. Мұрағатталды түпнұсқадан 2020 жылғы 19 мамырда.
Өндіріс саны салыстырмалы түрде аз болғандықтан, SR технологиясы бойынша өндіріс шығындары жоғары болады
- ^ «SR жүйелеріндегі ақауларға төзімділік».
- ^ Буш, Стив (2009). «Dyson вакуумы 104000 айн / мин. Щеткасыз тұрақты ток технологиясы». Электрондық апталық журнал. Архивтелген түпнұсқа 2012-04-11.
- ^ «Tesla Model 3 Motor - бұл туралы білуге болатынымның бәрі (құрылғыға қош келдіңіз)». CleanTechnica. 11 наурыз, 2018 жыл. Алынған 2018-06-18.
Сыртқы сілтемелер
- Релуктивтік қозғалтқыш жетектері
- Нақты уақыттағы модельдеу және редуктордың азайтылған моменті бар жоғары жылдамдықты жұмыс істеуге арналған мотор жетектерін басқару
- Торрей - Ауытқу генераторлары және оларды басқару DOI: 10.1109 / 41.982243
- Asadi - жетілдірілген коммутациялық релуктивті генератор жетегін құру және қолдану
- SR мәліметтер қорының мұрағаты
- Адам Биернат: Энергетика және автоматика саласындағы электр машиналары (Варшава политехникасы)
- Синхронды релуктанттық қозғалтқышын енгізу туралы түсініктер