Сервомеханизм - Servomechanism
Бұл мақала Инженерлік сарапшының назарына мұқтаж. Нақты мәселе: Мақала инженерлік ғылымның кең саласы туралы және академиялық және оқулықтарға сілтемелерден басқа күрделі қайта қарауды қажет етеді. (Қыркүйек 2013) |
Жылы басқару инженері а сервомеханизм, кейде қысқарады серво, қателерді сезуді қолданатын автоматты құрылғы кері байланыс механизмнің әрекетін түзету.[1] Ауыстырумен басқарылатын қосымшаларда оған әдетте кіріктірілген кіреді кодтаушы немесе нәтиженің қажетті нәтижеге жетуін қамтамасыз ететін басқа позициялық кері байланыс механизмі.[2]
Термин тек дұрыс болатын жүйелерге қолданылады кері байланыс немесе қателерді түзету сигналдары механикалық жағдайды, жылдамдықты, қатынасты немесе кез келген басқа өлшенетін айнымалыларды басқаруға көмектеседі.[3] Мысалы, автомобиль қуат терезесі басқару сервомеханизм емес, өйткені позицияны басқаратын автоматты кері байланыс жоқ - оператор мұны бақылау арқылы жасайды. Керісінше, автомобильдікі круиздік бақылау қолданады тұйықталған кері байланыс, бұл оны сервомеханизм ретінде жіктейді.
Қолданбалар
Позицияны бақылау

Серваның кең таралған түрі қарастырылған позицияны бақылау. Әдетте, сервосы болып табылады электр, гидравликалық, немесе пневматикалық. Олар теріс кері байланыс қағидаты бойынша жұмыс істейді, мұнда басқару кірісі механикалық жүйенің нақты жағдайымен салыстырылады, кейбір типтерімен өлшенеді түрлендіргіш шығу кезінде. Нақты және қажетті мәндер арасындағы кез-келген айырмашылық («қателік сигналы») күшейтіледі (және түрлендіріледі) және қатені азайту немесе жою үшін қажетті бағытта жүйені жүргізу үшін қолданылады. Бұл процедура кеңінен қолданылатын бірі болып табылады басқару теориясы. Әдеттегі сервостар айналмалы (бұрыштық) немесе сызықтық шығыс бере алады.
Жылдамдықты басқару
A арқылы жылдамдықты басқару губернатор сервомеханизмнің тағы бір түрі болып табылады. The бу машинасы механикалық басқарушыларды қолданады; тағы бір ерте қолдану жылдамдығын басқару болды су дөңгелектері. Екінші дүниежүзілік соғысқа дейін тұрақты жылдамдық винті маневр жасау үшін қозғалтқыштың айналу жиілігін бақылау үшін жасалған. Жанармай бақылауы газ турбинасы қозғалтқыштар гидромеханикалық немесе электронды басқаруды қолданады.
Басқалар
Орналастыру сервомеханизмдері алғаш рет әскери қызметте қолданылды өрт бақылау және теңізде жүзу жабдық. Бүгінгі күні сервомеханизмдер қолданылады автоматты станоктар, спутниктік бақылау антенналары, қашықтықтан басқарылатын ұшақтар, қайықтар мен ұшақтардағы автоматты навигациялық жүйелер және әуе кемесі -мылтықты басқару жүйелері. Басқа мысалдар сыммен ұшу жүйелер ұшақ әуе кемесінің басқару беттерін іске қосу үшін сервостарды қолданатын және радиомен басқарылатын модельдер сол мақсатта RC сервосын қолданатын. Көптеген автофокус камералар линзаны дәл жылжыту үшін сервомеханизмді де қолданады. A қатты диск жетегі субмикрометрлік орналасу дәлдігі бар магниттік серво жүйесі бар. Өнеркәсіптік машиналарда сервосы көптеген қозғалыстарда күрделі қозғалысты орындау үшін қолданылады.
Сервомотор

Сұр / жасыл цилиндр - бұл щетка түрі Тұрақты қозғалтқыш. Төменгі бөліктегі қара бөлімде планеталық редуктор қозғалтқыштың жоғарғы жағындағы қара зат оптикалық болып табылады айналмалы кодер позиция туралы кері байланыс үшін.
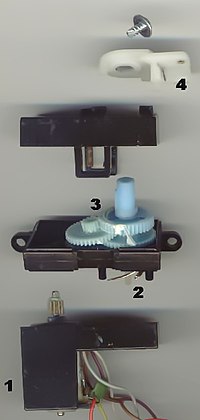
1. электр қозғалтқышы
2. позициялық кері байланыс потенциометр
3. төмендету беріліс
4. жетектің қолы
A сервомотор -мен біріктірілген қозғалтқыштың белгілі бір түрі айналмалы кодер немесе а потенциометр сервомеханизм қалыптастыру. Бұл жинақ өз кезегінде басқа сервомеханизмнің бөлігі болуы мүмкін. Потенциометр позицияны көрсету үшін қарапайым аналогты сигнал береді, ал кодер позицияны және жылдамдықты кері байланысты қамтамасыз етеді. PID контроллері позицияны дәлірек бақылауға және осылайша тұрақты позицияға жылдам жетуге мүмкіндік беру (берілген қозғалтқыш қуаты үшін). Потенциометрлер бағынады дрейф температура өзгерген кезде, ал кодерлер тұрақты және дәлірек болады.
Сервомоторлар жоғары деңгейге де, төменгі деңгейге де қолданылады. Жоғары жағында айналмалы кодерді қолданатын дәл өндірістік компоненттер бар. Төмен жағында арзан радиобақылау сервостары Жылы қолданылған (RC сервосы) радиомен басқарылатын модельдер еркін қозғалтқыш пен кіріктірілген контроллері бар қарапайым потенциометрдің орналасу сенсорын қолданады. Термин сервомотор бұл термин жоғары сапалы өндірістік компонентке жатады серво көбінесе потенциометрді қолданатын арзан құрылғыларды сипаттау үшін қолданылады. Қозғалтқыштар сервомоторлар болып саналмайды, бірақ олар үлкен сервомеханизмдерді құру үшін қолданылады. Қадамдық қозғалтқыштар олардың құрылысына байланысты бұрыштық орналасуға ие, және бұл әдетте кері байланыссыз ашық контур түрінде қолданылады. Олар әдетте дәлдігі орташа қосымшалар үшін қолданылады.
RC сервосы автомобильді басқару, жазықтықтағы басқару беттері немесе қайық рульі сияқты әртүрлі механикалық жүйелерді басқаруды қамтамасыз ету үшін қолданылады. Қол жетімділігі, сенімділігі және микропроцессорлармен басқарудың қарапайымдылығы арқасында олар көбінесе шағын масштабта қолданылады робототехника қосымшалар. Стандартты RC қабылдағышы (немесе микроконтроллер) жібереді импульстің енін модуляциялау (PWM) сервоға сигнал береді. Серво ішіндегі электроника импульстің енін позицияға айналдырады. Сервоны айналдыруға бұйрық берген кезде, мотор қозғалтқыш потенциометр командалық позицияға сәйкес мәнге жеткенше жұмыс істейді.
Тарих

Джеймс Уотт Келіңіздер бу машинасы губернатор әдетте бірінші қуатталған кері байланыс жүйесі болып саналады. The жел диірмені автоматты басқарудың ертерек мысалы болып табылады, бірақ ол ондай емес күшейткіш немесе пайда, бұл әдетте сервомеханизм деп саналмайды.
Кері байланыс позициясын басқарудың алғашқы құралы кеме болды рульдік қозғалтқыш, кеме дөңгелегінің позициясы негізінде үлкен кемелердің рульін орналастыру үшін қолданылады. Джон МакФарлейн Грей ізашар болды. Оның патенттелген дизайны қолданылған SS Үлкен Шығыс 1866 жылы.Джозеф Фаркот кері байланыс тұжырымдамасы үшін бірдей несиеге лайық болуы мүмкін, 1862 мен 1868 жылдар аралығында бірнеше патент бар.[4]
Телемоторды 1872 жылы ойлап тапқан Эндрю Беттс Браун, басқару бөлмесі мен қозғалтқыш арасындағы күрделі механизмдерді айтарлықтай жеңілдетуге мүмкіндік береді.[5] Бу рульдік қозғалтқыштары заманауи сервомеханизмнің сипаттамаларына ие болды: кіріс, шығыс, қателік сигналы және қатені нөлге бағыттау үшін теріс кері байланыс үшін пайдаланылатын қателік сигналын күшейту құралы. Рагоннет қуат кері механизм - бұл 1909 жылы патенттелген сызықтық қозғалысқа арналған ауа немесе бумен жұмыс жасайтын серо күшейткіш.[6]
Электр сервомеханизмдері 1888 жылы-ақ қолданылған Элиша Грей Келіңіздер Телаутограф.
Электрлік сервомеханизмдерге қуат күшейткіші қажет. Екінші дүниежүзілік соғыс электриктің дамуын көрді өрт бақылау сервомеханизмдер амплидин күшейткіш ретінде. Вакуумдық түтік жылы күшейткіштер қолданылған ЮНИСЕРВО таспалы диск UNIVAC I компьютер. Корольдік Әскери-теңіз күштері қашықтан басқару пультімен тәжірибе жасай бастады (RPC ) қосулы HMS чемпионы 1928 жылы және 1930 жылдардың басында прожекторларды басқару үшін RPC қолдана бастады. WW2 кезінде RPC мылтық тіреулерін және мылтық директорларын басқару үшін қолданылған.
Қазіргі сервомеханизмдерде қатты денелік күшейткіштер қолданылады, әдетте олардан құрастырылған MOSFET немесе тиристор құрылғылар. Кішкентай сервостар қуатты қолдана алады транзисторлар.
Сөздің шығу тегі француздардан шыққан деп есептейді »Le Servomoteur«немесе 1868 жылы Дж. Дж. Л. Фаркот гидравликалық және бу қозғалтқыштарын сипаттау үшін кемені басқаруда пайдалану үшін қолданған құлдық мотор.[7]
Сервоны қолданудың қарапайым түрі жарылыс - соққыны басқару. Басқарудың күрделі жүйелерінде пропорционалды бақылау қолданылады, PID бақылауы және зерттелетін мемлекеттік ғарыштық басқару қазіргі заманғы басқару теориясы.
Қойылым түрлері
Сервостарды кері байланысты бақылау жүйелері арқылы жіктеуге болады:[8]
- 0 типті сервос: тұрақты күйде олар тұрақты қателік сигналымен шығудың тұрақты мәнін шығарады;
- 1 типті сервос: тұрақты күйде олар нөлдік қателік сигналымен шығудың тұрақты мәнін шығарады, бірақ анықтаманың өзгеруінің тұрақты жылдамдығы сілтемені қадағалаудағы тұрақты қатені білдіреді;
- 2 типті сервос: тұрақты күйде олар нөлдік қателік сигналымен шығудың тұрақты мәнін шығарады. Анықтаманың өзгеруінің тұрақты жылдамдығы сілтемені бақылау кезінде нөлдік қатені білдіреді. Эталонның үдеуінің тұрақты жылдамдығы сілтемені қадағалаудағы тұрақты қателікті білдіреді.
The серво өткізу қабілеттілігі сервопазаның командалық енгізудегі жылдам өзгерістерді қадағалау мүмкіндігін көрсетеді.
Сондай-ақ қараңыз
- Бөлшек ат күші бар қозғалтқыш
- Қозғалысты басқару
- Сервоны басқару
- Синхрондау, сервомеханизмдерде қолданылатын таратқыш және қабылдағыш қозғалтқышының түрі
Әрі қарай оқу
- Беннетт, С. (1993). 1930–1955 жылдардағы басқару техникасының тарихы. Лондон: Электр инженерлері институты атынан Питер Перегринус Ltd. ISBN 0-86341-280-7.
- Хсуе-Шен Цян (1954) Инженерлік кибернетика, McGraw Hill, сілтеме HathiTrust
Әдебиеттер тізімі
- ^ Baldor Electric Company - Серво бақылау фактілері. 25 қыркүйек 2013 қол жеткізді
- ^ Анахайм Автоматизациясы: Servo Motor Guide. 25 қыркүйек 2013 қол жеткізді
- ^ BusinessDictionary.com анықтамасы. 25 қыркүйек 2013 қол жеткізді
- ^ Беннетт, Стюарт (1986-01-01). Басқару инженериясының тарихы, 1800–1930 жж. IET. 98-100 бет. ISBN 978-0-86341-047-5.
- ^ Эндрю Беттс Браун
- ^ Евгений Л. Рагоннет, локомотивтерді басқару механизмі, АҚШ патенті 930,225, 9 тамыз, 1909 жыл.
- ^ IEEE Industry Applications журналы наурыз / сәуір 1996 ж., 74 бет
- ^ Юнкин Дж., Сервоны басқарудың өндірістік жүйелері - негіздері және қолданбалары - екінші басылым, Тейлор және Фрэнсис, 2007 ж.