Протездеу - Prosthesis

| Мүгедектік |
|---|
Теория және модельдер |
|
Жылы дәрі, а протездеу (көпше: протездер; бастап Ежелгі грек протездеу, «қосымша, өтініш, қосымша»)[1] немесе протездік имплант[2][3] - дене жарақаттарынан, ауруларынан немесе туылған кездегі жағдайдан жоғалуы мүмкін жоғалып кеткен дене мүшелерін ауыстыратын жасанды құрал (туа біткен бұзылыс ). Протездер дене жетіспейтін бөлігінің қалыпты қызметін қалпына келтіруге арналған.[4] Ампута оңалту, ең алдымен, а физиатр физиатрлар, протездеушілер, мейірбикелер, терапевттер және кәсіптік терапевтерден тұратын тәртіпаралық топтың құрамында.[5] Протездерді қолмен немесе қолмен жасауға болады компьютерлік дизайн (CAD), бұл бағдарламалық жасақтама интерфейсі, ол авторларға компьютерде құрастыруды жобалауға және талдауға көмектеседі 2-D және 3-өлшемді графика сонымен қатар талдау және оңтайландыру құралдары.[6]
Түрлері
Адамның протезі адамның сыртқы келбеті мен функционалдық қажеттіліктеріне сәйкес құрастырылып, құрастырылуы керек. Мысалы, адамға трансрадиалды протез қажет болуы мүмкін, бірақ эстетикалық функционалды құрылғыны, миоэлектрлік құрылғыны, денемен жұмыс жасайтын құрылғыны немесе белгілі бір әрекетке байланысты құрылғыны таңдау керек. Адамның болашақтағы мақсаттары мен экономикалық мүмкіндіктері оған бір немесе бірнеше құрылғылардың бірін таңдауға көмектесуі мүмкін.
Краниофазиялық протездер ауызша және ауыздан тыс протездерді қосады. Ауыз қуысынан тыс протездер одан әрі гемифасиальды, жүрекшелік (құлақ), мұрын, орбиталық және көз. Ауыз ішілік протездерге жатады стоматологиялық протездер сияқты протездер, обтураторлар, және тіс импланттары.
Мойын протездеріне жатады көмей алмастырғыштар, трахея және жоғарғы өңеш ауыстыру,
Дененің соматикалық протездеріне жатады кеуде протездері бір немесе екі жақты болуы мүмкін, толық кеудеге арналған құрылғылар немесе емізік протездері.
Пениса протездері емдеу үшін қолданылады эректильді дисфункция, дұрыс пениса деформациясы, орындау фаллопластика және метоидиопластика биологиялық ерлердегі процедуралар және жаңа пенис салу әйелдер мен ерлер арасындағы жынысты ауыстыру операциялары.
Аяқ-қол протездері

Аяқ протездерге жоғарғы және төменгі аяғындағы протездер жатады.
Жоғарғы аяғындағы протездер ампутацияның әртүрлі деңгейлерінде қолданылады: алдыңғы бөлме, иық дезартикуляциясы, траншумеральды протез, локте дезартикуляция, трансрадиальды протез, білек дисартикуляциясы, толық қол, жартылай қол, саусақ, жартылай саусақ. Трансрадиалды протез - бұл локтен төмен қолды алмастыратын жасанды мүше.
Жоғарғы аяқ-қол протездерін үш негізгі санатқа жатқызуға болады: пассивті құрылғылар, денеден қуат алатын құрылғылар, сыртқы қуаттанатын (миоэлектрлік) құрылғылар. Пассивті құрылғылар негізінен косметикалық мақсатта қолданылатын пассивті қолдар немесе негізінен белгілі бір іс-шараларға арналған пассивті құралдар болуы мүмкін (мысалы, демалыс немесе кәсіптік). Пассивті құрылғылардың кең шолуы мен жіктелуін Maat әдеби шолуларынан табуға болады т.б.[7] Пассивті құрылғы статикалық болуы мүмкін, яғни құрылғының қозғалмалы бөліктері жоқ немесе оны реттеуге болады, яғни оның конфигурациясын реттеуге болады (мысалы, қолдың реттелетін ашылуы). Белсенді түсінудің болмауына қарамастан, пассивті құрылғылар объектіні бекітуді немесе тіреуді қажет ететін, немесе әлеуметтік өзара әрекеттесу кезінде гестекуляцияны қажет ететін бисануалды есептерде өте пайдалы. Ғылыми мәліметтерге сүйенсек, бүкіл әлемдегі жоғарғы аяқ-қолдардың үштен бір бөлігі пассивті протезді қолданады.[7] Корпуста жұмыс істейтін немесе кабельмен жұмыс жасайтын аяқтар зақымдалған қолдың қарама-қарсы иығына қорап пен кабельді бекіту арқылы жұмыс істейді. Үшінші санаттағы протездік құрылғылар - бұл миоэлектрлік қолдар. Олар сезу арқылы жұмыс істейді, арқылы электродтар, кезде бұлшық еттер жоғарғы қол жасанды қолдың ашылуына немесе жабылуына себеп болатын қозғалу. Протездеу индустриясында транс-радиалды протезді қолды көбінесе «BE» немесе локтен төмен протез деп атайды.
Төменгі аяғындағы протездер ампутацияның әртүрлі деңгейлерінде ауыстыруды қамтамасыз ету. Оларға жамбастың дезартикуляциясы, трансфеморальды протез, тізе дезартикуляциясы, транстибиальды протездеу, Симаның ампутациясы, аяқ, жартылай аяқ және саусақ жатады. Төменгі аяғындағы протездеу құралдарының екі негізгі санатына транс-тибиальды (жіліншік сүйегін кесіп өтетін кез-келген ампутация немесе жіліншіктің жетіспеушілігіне алып келетін туа біткен аномалия) және транс-феморальды (феморальды сүйекті тежейтін кез-келген ампутация немесе феморальды жетіспеушілікке әкелетін туа біткен аномалия жатады) жатады. ).
Трансфеморальды протез - бұл тізеден жоғары жетіспейтін аяқты алмастыратын жасанды мүше. Трансфеморальды ампуттар қалыпты қозғалысты қалпына келтіру үшін өте қиын уақытқа ие болуы мүмкін. Жалпы алғанда, трансфеморальды ампута екі аяғы бар адамға қарағанда жүру үшін шамамен 80% көп энергия жұмсауы керек.[8] Бұл тізедегі қозғалыс қиындықтарына байланысты. Жаңа және жетілдірілген конструкцияларда гидравлика, көміртекті талшық, механикалық байланыстар, қозғалтқыштар, компьютерлік микропроцессорлар және пайдаланушыға көбірек бақылау жасау үшін осы технологиялардың инновациялық үйлесімдері қолданылады. Протездеу индустриясында транс-феморальды протездік аяқ көбіне «АК» немесе тізе протезінің үстінде аталады.
Транстибиальды протез - бұл жасанды аяқ, ол тізеден төмен тұрған аяқты ауыстырады. Трансфеморальды ампутациясы бар адамға қарағанда, транстибиальды ампута қалыпты қозғалысты тез қалпына келтіруге қабілетті, бұл көбінесе тізені ұстап тұруға байланысты, бұл оңай қозғалуға мүмкіндік береді. Төменгі аяғындағы протездеу жамбас деңгейінде немесе одан төмен орналасқан жасанды ауыстырылған аяқтарды сипаттайды. Протездеу индустриясында тиби-тиби тәрізді протездеу аяғы «BK» немесе тізе протезінің астында жиі аталады.
Физикалық терапевттер адамды аяқ протезімен жүруге үйрету үшін дайындалған. Мұны істеу үшін физиотерапевт ауызша нұсқаулар бере алады, сонымен қатар адамға жанасу немесе тактильді белгілерді қолдану арқылы басшылық жасай алады. Бұл клиникада немесе үйде жасалуы мүмкін. Үйде мұндай жаттығу сәтті болуы мүмкін деген бірнеше зерттеулер бар, егер емдеу жүгіру жолын қолданса.[9] Жүгіру жолағын пайдалану физикалық терапиямен қатар адамға протезбен жүрудің көптеген қиындықтарын сезінуге көмектеседі.
Ұлыбританияда төменгі аяқ-қол ампутациясының 75% -ы жеткіліксіз болғандықтан жасалады таралым (дискулярлық).[10] Бұл жағдай көптеген басқа медициналық жағдайлармен байланысты (бірлескен аурулар ) қоса қант диабеті және жүрек ауруы бұл қозғалғыштық пен тәуелсіздікке қол жеткізу үшін протездік аяқ-қолды қалпына келтіру және қолдану қиынға соғуы мүмкін.[10] Қан айналымы жеткіліксіз және төменгі аяғынан айырылған адамдар үшін протездік оңалту тәсілдерін таңдау туралы хабарлау үшін зерттеулердің жеткіліксіздігіне байланысты дәлелдер жеткіліксіз.[10]

Төменгі аяғындағы протездер көбінесе ампутация деңгейімен немесе хирургтың атымен жіктеледі:[11][12]
- Трансфеморальды (тізеден жоғары)
- Транстибиальды (тізеден төмен)
- Тобықтың дисартикуляциясы (мысалы: Симе ампутациясы)
- Тізе дисартикациясы
- Геми-пельвиктомия (жамбас дисартикуляциясы)
- Жартылай аяқтың ампутациясы (Пирогофф, Тальо-Навикулярлық және Калканео-кубоид (Шопарт), Тарсо-метатарсаль (Лисфранк), Транс-метатарсаль, Метатарсаль-фаланг, Рей ампутациясы, аяқтың ампутациясы).[12]
- Ван Нес айналдыру пластикасы
Протездік шикізат
Ампутацияланған адамға ыңғайлы болу үшін протезді жеңіл етіп жасайды. Осы материалдардың кейбіреулері:
- Пластмассалар:
- Полиэтилен
- Полипропилен
- Акрилдер
- Полиуретан
- Ағаш (ерте протездеу)
- Резеңке (ерте протездеу)
- Жеңіл металдар:
- Титан
- Алюминий
- Композициялар:
- Көміртекті талшық[4]
Иттерді, мысықтарды, шошқаларды, қояндарды және тасбақаларды қоса алғанда, зақымдалған үй жануарларын қалпына келтіру кезінде доңғалақты протездер кеңінен қолданылды.[13]
Тарих

Протездеу Ежелгі Египет б.з.д 3000 ж., протездеудің алғашқы белгілері пайда болды ежелгі Египет және Иран. Көз протездеу туралы алғашқы ескертулер Египеттің тарихынан алынған Хорус көзі шамамен сол жақ көзді қамтитын біздің эрамызға дейінгі 3000 жыл Хорус жұлып алынып, содан кейін қалпына келтірілді Thoth. Біздің эрамызға дейінгі 3000-2800 жылдары протездеудің алғашқы археологиялық дәлелі табылған ежелгі Иран, онда әйелге көмілген протез табылған Шахр-и Шухта. Ол жұқа алтынмен жабылған битум пастасынан жасалған болуы мүмкін.[14] Египеттіктер аяқ протездеудің алғашқы ізашарлары болды, бұл денеден табылған ағаш саусақпен көрсетілген Жаңа патшалық шамамен б.з.д.[15] Тағы бір ерте жазба ескертуде табылған Оңтүстік Азия шамамен б.з.д 1200 ж., жауынгер патшайым қатысады Вишпала ішінде Ригведа.[16] Рим қоласы тәждер табылды, бірақ оларды қолдану медициналықке қарағанда эстетикалық болуы мүмкін.[17]
Протез туралы ерте еске салу грек тарихшысының сөзінен шыққан Геродот, кім туралы әңгімелейді Hegesistratus, грек көріпкел одан құтылу үшін өз аяғын кесіп тастаған Спартан ұстаушылар және оны ағашқа ауыстырды.[18]
Ағаш және металл протездеу




Үлкен Плиний Рим генералы туралы ертегі жазылған, Маркус Сергиус, үгіт жүргізу кезінде оң қолы кесіліп, ан темір қол шайқасқа оралуы үшін қалқанын ұстап тұруға мәжбүр болды. Әйгілі және әбден тазартылған[19] тарихи протездік қолы сол болды Гётц фон Берличинген, 16 ғасырдың басында жасалған. Алғаш рет протездік құрылғыны қолдану б.з.д. 950-710 жж. 2000 жылы патолог-патологтар ежелгі Фиваның қасында Египеттің некрополисінде жерленген үлкен саусақ бар мумияны тапты. Ағаш пен былғарыдан тұратын бұл саусақ қолданудың дәлелдерін көрсетті. Био-механикалық инженерлер 2011 жылы көбейткенде, зерттеушілер бұл ежелгі протез оның иесіне жалаң аяқ және Египет үлгісіндегі сандалмен жүруге мүмкіндік беретіндігін анықтады. Бұған дейін ең алғашқы протез жасанды болып табылған Капуадан шыққан аяғы.[20]
Шамамен сол уақытта, Франсуа де ла Нуа ХVІІІ ғасырда темір қолы болған, Рене-Роберт Кавальье де ла Саль.[21] Анри де Тонти қолына протездік ілмек болған. Орта ғасырларда протездеу формасы бойынша негізгі болып қала берді. Денесі әлсіреген рыцарьларға протез жасайтын еді, сондықтан олар қалқан ұстап, найзаны немесе қылышты ұстап, не тұрған жауынгерді тұрақтандырады.[22] Күнделікті өмірде көмектесетін кез-келген нәрсені бай адамдар ғана ала алатын.[дәйексөз қажет ]
Итальяндыққа тиесілі протездің бірі ғалымдардың болжамынша, оның кесілген оң қолын пышақпен алмастырған.[23][24] Табылған онтогенезді зерттейтін ғалымдар Лонгобард зират Повеглиано Веронез, адамның біздің эрамыздың 6-8 ғасырлары аралығында өмір сүрген деп болжайды.[25][24] Ер адамның денесінің жанынан табылған материалдар пышақ протезінің былғары белбеумен бекітілгенін, оны тісімен бірнеше рет қатайтуын болжайды.[25]
Қайта өрлеу дәуірінде протездеу темір, болат, мыс және ағашты қолдана отырып дамыды. Функционалды протездеу 1500-ші жылдары пайда бола бастады.[26]
20 ғасырға дейінгі техниканың дамуы
Итальяндық хирург ампутацияланған адамның бас киімін алып тастауға, әмиянын ашып, қолын қоюға мүмкіндік беретін қолы бар екенін жазды.[27] Ампутациялық хирургия мен протездік дизайнды жақсарту өз қолына келді Ambroise Paré. Оның өнертабыстарының арасында тізерлеп тұрған тізе үстіндегі қондырғы болды қазық аяғы және аяқтың протезі бекітілген позициямен, реттелетін байламмен және тізе құлпын басқарумен. Оның жетістіктерінің функционалдығы болашақ протездеудің қалай дами алатындығын көрсетті.
Қазіргі заманға дейінгі басқа да жетілдірулер:
- Питер Вердун - Алдымен құлыптаусыз тізе астындағы протез (BK).
- Джеймс Поттс - тізе мен тобыққа дейін катгут сіңірлері арқылы басқарылатын ағаш сабаннан және розеткадан, болат тізе буынынан және буыннан жасалған протез. «Anglesey Leg» немесе «Selpho Leg» деген атауға ие болды.
- Мырза Джеймс Сим - жамбаста ампутацияны қамтымаған тобықты кесудің жаңа әдісі.
- Бенджамин Палмер - Сельфо аяғында жақсартылған. Табиғи көріністі қозғалысты модельдеу үшін алдыңғы серіппе және жасырын сіңір қосылды.
- Дюбуа Пармли - Сорғыш розеткасымен, полицентрлік тізесімен және көп буынды аяқпен протезден жасалған.
- Марсель Desoutter & Чарльз Дезоутер - Бірінші алюминий протезі[28]
- Генри Хизер Бигг пен оның ұлы Генри Роберт Хизер Бигг, Қырым соғысынан кейін жараланған сарбаздарды «хирургиялық құрылғылармен» қамтамасыз ету жөніндегі патшайымның бұйрығын жеңіп алды. Олар екі қолды ампутаға тоқуға мүмкіндік беретін қолдар мен піл сүйегіне, киізге және былғарыға сүйене отырып, басқаларға табиғи сезінетін қолды дамытты.[29]
Екінші дүниежүзілік соғыстың соңында ҰҒА (Ұлттық Ғылым Академиясы) протездеуді жақсарту мен дамытуды қолдай бастады. Үкіметтің қаржыландыруы арқылы Армия, Әскери-теңіз күштері, Әскери-әуе күштері және Ардагерлер әкімшілігі шеңберінде зерттеу және дамыту бағдарламасы әзірленді.
Төменгі жақтың қазіргі тарихы

Екінші дүниежүзілік соғыстан кейін команда Калифорния университеті, Беркли оның ішінде Джеймс Фурт және К.В.Радклиф тізеден жоғары ампутация үшін дренажды қондыру жүйесін жасап, төртбұрышты розетканы дамытуға көмектесті. Төменгі аяқ-қол мүшелеріне арналған розетка технологиясы 1980 жылдары Джон Саболич C.P.O. контурлық қондырылған трокантериялық-бақыланатын туралау әдісін (CATCAM) ойлап тапқан кезде, одан әрі Саболич розеткасына айналу кезінде одан әрі төңкерісті жасады. Ол Иван Лонг пен Оссур Кристенсеннің бағытын ұстанды, өйткені олар төртбұрышты розеткаға балама жасап шығарды, ол өз кезегінде ағаштан жасалған ашық штепсельді розеткадан кейін жүрді.[30] Ілгерілеу ұяшықтың пациентпен байланыс үлгісіндегі айырмашылыққа байланысты болды. Бұған дейін розеткалар төртбұрышты формада бұлшықет тініне арналған мамандандырылған қорғаныссыз жасалған. Осылайша, жаңа құрылымдар сүйектік анатомияны оқшаулауға көмектеседі, оны орнына қояды және салмақты қолданыстағы мүшеге, сондай-ақ науқастың бұлшық етіне біркелкі бөледі. Исхиалды оқшаулау пациенттерді күтуге көмектесу үшін көптеген протезисттермен танымал және қолданылады. Осылай оқшаулау розеткасының өзгерістері бар және әрбір розетка пациенттің қажеттіліктеріне сәйкес келеді. Розеткалардың дамуы мен өзгеруіне жылдар ішінде үлес қосқан басқа адамдар: Тим Стаатс, Крис Хойт және Фрэнк Готтшалк. Готтшальк ампутациялық хирург жасаған хирургиялық процедураны талап ететін CAT-CAM ұясының тиімділігі туралы пікір таластырды, бұл ампутацияны розетканың кез-келген типтегі протезін жақсы қолдануға дайындауда маңызды болды.[31]
Микропроцессормен басқарылатын алғашқы протездік тізелер 1990 жылдардың басында пайда болды. Интеллектуалды протез микропроцессормен басқарылатын сатылымдағы алғашқы протездік тізе болды. Оны Час шығарды. А.Блатчфорд және Сонс, Ұлыбритания, 1993 ж., Протезбен жүруді табиғи және табиғи етіп жасады.[32] Жақсартылған нұсқасы 1995 жылы Intelligent Protez Plus деп аталды. Блатчфорд 1998 жылы «Адаптивті протез» деген тағы бір протез шығарды. Адаптивті протезде гидравликалық басқару элементтері, пневматикалық басқару құралдары және микропроцессор қолданылып, жүру жылдамдығының өзгеруіне жауап беретін жүрісті қамтамасыз етті. Шығындарды талдау, өмір сүруге арналған жыл сайынғы шығындарды ескере отырып, 45 жыл ішінде тізе үстіндегі күрделі протез шамамен 1 миллион доллар болатынын көрсетеді.[33]
2019 жылы AT2030 бойынша жоба іске қосылды, онда тапсырыс бойынша розеткалар гипстен емес, термопластиктен жасалған. Бұл тезірек жасалады және айтарлықтай арзан. Розеткалар Amparo сенім ұялары деп аталды.[34][35]
Жоғарғы жақтың қазіргі тарихы
2005 жылы, ДАРПА басталды Революциялық протездеу бағдарлама.[36][37][38][39][40][41]
Науқас процедурасы
Протез - бұл ампутацияланған немесе туа біткен кемістігі бар немесе аяқ-қолдың функционалды ауыстырылуы. Протез жасаушылар протездеу құрылғысының тағайындалуына, жасалуына және басқарылуына жауап береді.
Көп жағдайда протездеу науқастың зақымдалған аяқ-қолының гипстен басталуынан басталады. Жеңіл, беріктігі жоғары термопластика пациенттің осы үлгісіне сәйкес жасалады. Көміртекті талшық, титан және кевлар сияқты алдыңғы қатарлы материалдар жаңа протезді жеңілдете отырып, беріктік пен беріктікті қамтамасыз етеді. Неғұрлым күрделі протездер қосымша тұрақтылық пен басқаруды қамтамасыз ететін жетілдірілген электроникамен жабдықталған.[42]
Қазіргі технология және өндіріс

Осы жылдар ішінде жасанды аяқ-қолдарда жетістіктер болды. Сияқты жаңа пластмассалар және басқа материалдар көміртекті талшық, жасанды аяқ-қолдың мықты және жеңіл болуына мүмкіндік беріп, аяқ-қолды басқаруға қажетті қосымша энергияны шектейді. Бұл әсіресе феморальды ампутациялар үшін өте маңызды. Қосымша материалдар жасанды аяқ-қолдардың анағұрлым шынайы көрінуіне мүмкіндік берді, бұл транс-радиалды және траншумеральды ампуттер үшін маңызды, өйткені олар жасанды аяқтың ашылуы ықтималдығы жоғары.[43]
Жаңа материалдардан басқа, жасанды аяқ-қолдарда электрониканы қолдану өте кең таралды. Бұлшықет қимылын электрлік сигналға айналдыру арқылы аяқ-қолды басқаратын миоэлектрлік аяқ-қолдар кабельдік аяқ-қолдарға қарағанда едәуір кең таралған. Миоэлектрлік сигналдарды электродтар алады, сигнал интеграцияланады және ол белгілі бір шектен асқаннан кейін протездік аяқ-қолды басқару сигналы іске қосылады, сондықтан барлық миоэлектрлік басқару элементтері артта қалады. Керісінше, кабельді басқару дереу және физикалық болып табылады және сол арқылы миоэлектрлік бақылау жасамайтын белгілі бір дәрежеде тікелей кері байланыс ұсынады. Аяқ-қол өндірісінде де компьютерлер кеңінен қолданылады. Автоматтандырылған дизайн және компьютерлік өндіріс жасанды аяқ-қолдарды жобалауға және жасауға көмектесу үшін жиі қолданылады.[43][44]
Қазіргі жасанды аяқтардың көп бөлігі ампутаның қалдық мүшесіне (дүміне) белдіктермен және манжеттермен бекітіледі сору. Қалған аяқ протездегі розеткаға тікелей енеді, немесе - көбінесе бүгінде - локер қолданылады, содан кейін розеткаға вакууммен (сорғыш розеткаларымен) немесе түйреуішпен бекітіледі. Лайнерлер жұмсақ, сондықтан олар қатты розеткаларға қарағанда әлдеқайда жақсы сорғышты жасай алады. Силикон гильзаларын стандартты өлшемдерде алуға болады, көбінесе дөңгелек (дөңгелек) көлденең қимасы бар, бірақ аяқтың кез-келген қалдық формасы үшін тапсырыс бойынша гильзалар жасауға болады. Розетка аяқтың қалған бөлігіне сәйкес келу үшін және жасанды аяқтың күшін қалдық аяқтың ауданы бойынша бөлу үшін жасалады (тек бір ұсақ нүктеге емес), бұл қалдық аяқтың тозуын азайтуға көмектеседі. Реттелетін розетка қалдық аяқ-қолдың гипстен жасалған гипстен немесе қазіргі кезде, әдетте, аяқ-қолдың үстінен тозған лайнерден жасалынған, содан кейін гипстен құйма жасау арқылы жасалады. Жаңа әдістерге лазермен басқарылатын өлшеу кіреді, оны компьютерге тікелей енгізуге болады, ол жетілдірілген дизайнға мүмкіндік береді.
Қалдық аяғы мен розетка қондырғысының бір проблемасы - бұл нашар аяқталу қалдық аяқ пен ұяшық немесе лайнердің жанасу аймағын азайтады, ал аяқтың қалдық қабығы мен розетка немесе астар арасындағы қалталарды көбейтеді. Қысым одан да жоғары, бұл ауырсынуы мүмкін. Ауа қалталары терді жинап, теріні жұмсарта алады. Сайып келгенде, бұл терінің қышынуының жиі себебі болып табылады. Уақыт өте келе бұл терінің бұзылуына әкелуі мүмкін.[8]
Жасанды аяқ-қолдар әдетте келесі қадамдарды қолдану арқылы жасалады:[43]
- Аяқтың қалдықтарын өлшеу
- Жасанды мүшеге қажетті мөлшерді анықтау үшін денені өлшеу
- Силиконды лайнерді орнату
- Қалдық аяққа тозған лайнер моделін құру
- Қалыптасуы термопластикалық модельдің айналасындағы парақ - Бұл протездің жарамдылығын тексеру үшін қолданылады
- Тұрақты розетканы қалыптастыру
- Жасанды мүшенің пластикалық бөліктерін қалыптастыру - Әр түрлі әдістер қолданылады, соның ішінде вакуумды қалыптастыру және инжекциялық қалыптау
- Жасанды мүшенің металл бөлшектерін жасау кастинг
- Бүкіл мүшені жинау
Дене қуатын қолдар
Қазіргі технология денеде жұмыс істейтін қолдардың миоэлектрлік қолдың жасаған жұмысының жартысынан үштен біріне дейінгі салмағын өлшеуге мүмкіндік береді.
Розеткалар
Ағымдағы денеде жұмыс істейтін қолдарда қатты эпоксидтен немесе көміртекті талшықтан жасалған розеткалар бар. Бұл розеткаларды немесе «интерфейстерді» сүйектердің көрнекті жерлеріне төсеуді қамтамасыз ететін жұмсақ, сығылатын көбік материалымен қаптау арқылы ыңғайлы етуге болады. Өздігінен тоқтайтын немесе кондиарлы розетканың дизайны локтен төмен орта және орташа диапазоны барларға пайдалы. Ұзынырақ аяқтар суспензияны күшейту үшін құлыпты орамалы ішкі лайнерді немесе күрделі байламды пайдалануды қажет етуі мүмкін.
Білектер
Білек бөліктері - бұл UNF 1 / 2-20 жіпімен (АҚШ) тұратын бұрандалы коннекторлар немесе жылдам шығарылатын коннектор, олардың әртүрлі модельдері бар.
Өз еркімен ашу және жабу
Дене қуатымен жұмыс жасайтын жүйелердің екі түрі бар: ерікті ашу «тартуға тарту» және ерікті жабу «тартуға жабу». Іс жүзінде барлық «сплит ілмектер» протездері ерікті ашылу типті жүйемен жұмыс істейді.
GRIPS деп аталатын неғұрлым заманауи «алдын-ала жасаушылар» ерікті жабу жүйелерін қолданады. Айырмашылықтар айтарлықтай. Өз еркімен ашылатын жүйелерді қолданушылар серпімді белдеулерге немесе серіппелерге негізделеді, ал ерікті жабылатын жүйелердің пайдаланушылары дене күші мен энергиясына сүйенеді.
Ерікті жабылатын қолданушылар қалыпты фунтқа тең, фунтқа дейін немесе жүз фунттан асатын күштер жасай алады. Ерікті жабылатын GRIPS адамның қолы сияқты ұстау үшін үнемі кернеуді талап етеді және бұл қасиетте олар адамның қолына сәйкес келеді. Ерікті ашылатын сплит пайдаланушылар резеңке немесе серіппелер шығара алатын күштермен шектеледі, олар әдетте 20 фунттан төмен.
Кері байланыс
Қосымша айырмашылық пайдаланушыға не ұстап тұрғанын «сезінуге» мүмкіндік беретін жасалған био кері байланыста бар. Бір кездері ерікті түрде ашылатын жүйелер ұстап тұру күшін қамтамасыз етеді, осылайша олар қолдың соңында пассивті орын сияқты жұмыс істейді. Ұстап тұрған заттың айналасында ілгек жабылғаннан кейін, кері байланыс ұсынылмайды. Ерікті жабу жүйелері тікелей қамтамасыз етеді пропорционалды бақылау және пайдаланушы өзінің қаншалықты күш қолданып жатқанын сезінуі үшін биологиялық кері байланыс.
Жақында жүргізілген зерттеу қолдан протезден алынған жасанды датчиктер берген ақпаратқа сәйкес медианалық және ульнарлық нервтерді қоздыру арқылы ампутацияланған адамға физиологиялық тұрғыдан сәйкес (табиғиға жақын) сенсорлық ақпарат беруге болатындығын көрсетті. Бұл кері байланыс қатысушыға протездің қабылдау күшін тиімді түрде модуляциялауға мүмкіндік берді, бұл визуалды немесе есту кері байланысы жоқ.[45]
2013 жылдың ақпанында зерттеушілер École Polytechnique Fédérale de Lozanne Швейцарияда және Scuola Superiore Sant'Anna Италияда ампуттың қолына электродтар салынды, бұл пациентке сенсорлық кері байланыс берді және протезді нақты уақыт режимінде басқаруға мүмкіндік берді.[46] Жоғарғы қолында жүйкелермен байланысқан сымдармен даттық науқас заттармен жұмыс істей білді және лезде жанасу сезімін Silvestro Micera және Швейцария мен Италияның зерттеушілері жасаған арнайы жасанды қол арқылы алды.[47]
2019 жылдың шілде айында бұл технологияны зерттеушілер одан әрі кеңейтті Юта университеті, Джейкоб Джордж басқарады. Зерттеушілер тобы пациенттің қолына электродтарды имплантациялап, бірнеше сенсорлық ережелерді анықтады. Содан кейін олар әр электродты әр сенсорлық өсиеттің қалай қозғалғанын анықтауға ынталандырады, содан кейін протезге сенсорлық ақпаратты түсіруге кіріседі. Бұл зерттеушілерге пациенттің табиғи қолынан алатын ақпараттың дәл жуықтамасын алуға мүмкіндік береді. Өкінішке орай, қарапайым пайдаланушыға қолды сатып алу өте қымбат, дегенмен Джейкоб сақтандыру компаниялары протездеу шығындарын жаба алады деп атап өтті.[48]
Терминалды құрылғылар
Терминал құрылғыларында бірқатар ілгектер, преенсорлар, қолдар немесе басқа құрылғылар бар.
Ілгектер
Ерікті ашылатын сплит жүйелері қарапайым, ыңғайлы, жеңіл, берік, әмбебап және салыстырмалы түрде қол жетімді.
Сыртқы түрі немесе жалпы әмбебаптығы үшін ілмек адам қолына сәйкес келмейді, бірақ оның материалдық төзімділігі механикалық кернеу кезінде адамның қолынан асып түсуі мүмкін (тіпті ілмекті қораптарды кесу үшін немесе балға ретінде пайдалануға болады, ал бұл бірдей емес) қалыпты қолмен болуы мүмкін), термиялық тұрақтылық үшін (қайнаған судан заттарды ұстауға, етті грильге айналдыруға, сіріңке толық жанып кеткенше ұстауға болады) және химиялық қауіптер үшін (металл ілмек ретінде) қышқылдарға немесе сілтіге төзеді, протезді қолғап немесе адамның терісі сияқты еріткіштерге әсер етпейді).
Қолдар

Протездік қолдар ерікті түрде де, ерікті түрде де жабылатын нұсқаларда қол жетімді, өйткені олардың күрделі механикасы мен косметикалық қолғап жамылғысы салыстырмалы түрде үлкен активтендіру күшін қажет етеді, ол қолданылатын әбзелдің түріне байланысты ыңғайсыз болуы мүмкін.[49] Нидерландыдағы Дельфт технологиялық университетінің жуырдағы зерттеуі механикалық протездік қолдарды дамытуға соңғы онжылдықтарда назар аударылмағанын көрсетті. Зерттеу көрсеткендей, қазіргі механикалық қолдардың көпшілігінің қысу күшінің деңгейі практикалық қолдану үшін өте төмен.[50] Ең жақсы сыналған қол 1945 жылы жасалған протездік қол болды. Алайда 2017 жылы бионикалық қолдармен зерттеу басталды Лаура Хруби туралы Вена медициналық университеті.[51][52] Үш өлшемді басып шығаруға болатын бірнеше ашық аппаратуралар қол жетімді болды.[53] Кейбір компаниялар пациенттің жоғарғы қолына қондыру үшін интеграцияланған білекпен роботтандырылған қолдар шығарады[54][55] және 2020 жылы итальяндық технологиялық институтта (IIT) интеграцияланған білекпен (Soft Hand Pro) тағы бір роботты қол жасалды.[56]
Коммерциялық жеткізушілер мен материалдар
Хосмер және Отто Бок Ірі коммерциялық провайдерлер. Механикалық қолдарды Хосмер мен Отто Бок сатады; Беккер қолын әлі күнге дейін Беккер отбасы өндіреді. Протезделген қолдарға стандартты қойма немесе тапсырыс бойынша дайындалған косметикалық көрінетін силикон қолғаптары орнатылуы мүмкін. Бірақ әдеттегі жұмыс қолғаптарын да киюге болады. Басқа терминалдық құрылғыларға V2P Prehensor, тұтынушыларға оның аспектілерін өзгертуге мүмкіндік беретін жан-жақты мықты ұстағыш, Texas Assist Devices (барлық құралдар ассортиментімен) және спортқа арналған бірқатар терминал құрылғыларын ұсынатын TRS кіреді. Кабельдік шнурларды ұшақтың болат кабельдерін, шарикті ілмектерді және өздігінен майлайтын кабель қабықшаларын пайдаланып жасауға болады. Кейбір протездеу тұзды суда қолдануға арналған.[57]
Төменгі аяғындағы протездеу

Төменгі аяғындағы протездеу жамбас деңгейінде немесе одан төмен орналасқан жасанды ауыстырылған аяқтарды сипаттайды. Барлық жастағы адамдарға қатысты Эфрайым және басқалар. (2003) 10000 тұрғынға шаққанда барлық себептер бойынша төменгі аяғындағы ампутацияның 2,0-5,9 құрайды деген бағасын тапты. Аяқтың туа біткен жетіспеушілігінің туудың таралу деңгейі үшін олар 10000 туылғандарға шаққанда 3,5-7,1 жағдайды анықтады.[58]
Төменгі аяғындағы протездеу құралдарының екі негізгі санатына транс-тибиальды (жіліншік сүйегін кесіп өтетін кез-келген ампутация немесе жіліншіктің жетіспеушілігіне алып келетін туа біткен аномалия) және транс-феморальды (феморальды сүйек аймағын кесетін кез-келген ампутация немесе феморальды туа біткен аномалия жатады) жатады. жетіспеушілік). Протездеу индустриясында транс-тибиалды протездік аяқты көбінесе «BK» немесе тізе протезінің астында, ал феморальды протезді аяқты «AK» немесе тізе протезінің үстінде жиі атайды.
Басқа, сирек кездесетін төменгі аяғындағы жағдайларға мыналар жатады:
- Жамбас дисартикулярлары - бұл әдетте ампутацияланған немесе туа біткен науқас пациенттің жамбас буынында немесе оған жақын жерде ампутация немесе аномалия болғанын білдіреді.
- Тізе дезартикуляциясы - бұл әдетте жамбас сүйегін жіліншік сүйектен шығаратын тізе арқылы ампутацияны білдіреді.
- Symes - бұл пятки жастықшасын сақтай отырып, тобықтан айыру.
Розетка
Розетка қалдықтар мен протездер арасындағы интерфейс ретінде қызмет етеді, бұл салмақты көтеруге, қозғалысты басқаруға және проприоцепцияға қолайлы.[59] Қолайсыздық пен терінің бұзылуы сияқты ұяшық мәселелері төменгі аяғындағы ампутациялармен кездесетін маңызды мәселелердің қатарына жатады.[60]
Шанка және қосқыштар
Бұл бөлік тізе буыны мен аяқтың арасында (аяқтың жоғарғы протезі кезінде) немесе розетка мен табан арасында арақашықтық пен тірек жасайды. Білезік пен тізе / аяқ арасында қолданылатын қосқыштардың түрі протездің модульдік немесе модуль еместігін анықтайды. Модуль дегеніміз - аяқтың розеткаға қатысты бұрышы мен жылжуын фитингтен кейін өзгертуге болатындығын білдіреді. Дамушы елдерде протез көбінесе модульдік емес болып келеді, бұл құнын төмендету үшін. Балаларды қарау кезінде бұрыш пен биіктіктің модульділігі маңызды, себебі олардың орташа өсімі жыл сайын 1,9 см.[61]
Аяқ
Жерге жанасуды қамтамасыз ететін аяғы күйзелісті сіңіру мен тұрақтылықты қамтамасыз етеді.[62] Сонымен қатар, бұл жүру биомеханикасына пішіні мен қаттылығымен әсер етеді. Себебі қысым центрінің траекториясы (COP) және жердегі реакция күштерінің бұрышы табанның пішіні мен қаттылығымен анықталады және жүрудің қалыпты сызбасын шығару үшін сыналушының құрылымына сәйкес келуі керек.[63] Andrysek (2010) табанның әр түрлі 16 түрін тапты, олардың төзімділігі мен биомеханикасына қатысты әр түрлі нәтижелер бар. Қазіргі аяқтардағы негізгі проблема - беріктік, төзімділік 16-32 ай аралығында[64] Бұл нәтижелер ересектерге арналған, ал балалар үшін белсенділіктің жоғарылауы мен масштабтың әсерінен нашар болуы мүмкін. Аяқтың және аяқтың протездік құралдарының әр түрін салыстыратын дәлелдер табан / аяқтың бір механизмінің басқасынан артық екендігін анықтауға жеткіліксіз.[65] Құрылғы туралы шешім қабылдаған кезде құрылғының құны, адамның функционалдық қажеттілігі және белгілі бір құрылғының болуы ескерілуі керек.[65]
Тізе буыны
Транс-феморальды ампутация кезінде артикуляцияны қамтамасыз ететін кешенді коннектор қажет, бұл бұрылыс фазасында бүгілуге мүмкіндік береді, бірақ тұру кезінде емес.
Микропроцессорлық басқару
Жүру кезінде тізенің функционалдығын имитациялау үшін тізенің бүгілуін басқаратын микропроцессорлық басқарылатын тізе буындары жасалды. Кейбір мысалдар Отто Бок 1997 жылы енгізілген C-leg, Оссур Rheo Knee, 2005 жылы шығарылған, Оссурдың Power Knee, 2006 жылы ұсынылған, Freedom Innovations және DAW Industries ‘Self-Learning Knee (SLK) компаниясының Plié Knee.[66]
Идеяны бастапқыда канадалық инженер Келли Джеймс әзірледі Альберта университеті.[67]
Микропроцессор тізе бұрышы датчиктері мен момент датчиктерінің сигналдарын түсіндіру және талдау үшін қолданылады. Микропроцессор ампутацияны қолданатын қозғалыс түрін анықтау үшін датчиктерінен сигналдар алады. Микропроцессорлық басқарылатын тізе буындарының көпшілігі протездің ішінде орналасқан батареядан жұмыс істейді.
Микропроцессормен есептелген сенсорлық сигналдар туындаған қарсылықты басқару үшін қолданылады гидравликалық цилиндрлер тізе буынында. Шағын клапандар мөлшерін бақылайды гидравликалық сұйықтық цилиндрге және одан шығуы мүмкін, осылайша тізенің жоғарғы бөлігіне қосылған поршеннің созылуы мен қысылуын реттейді.[33]
Микропроцессорлық протездің басты артықшылығы - ампуттың табиғи жүрісіне жақындату. Some allow amputees to walk near walking speed or run. Variations in speed are also possible and are taken into account by sensors and communicated to the microprocessor, which adjusts to these changes accordingly. It also enables the amputees to walk downstairs with a step-over-step approach, rather than the one step at a time approach used with mechanical knees.[68] There is some research suggesting that people with microprocessor-controlled prostheses report greater satisfaction and improvement in functionality, residual limb health, and safety.[69] People may be able to perform everyday activities at greater speeds, even while multitasking, and reduce their risk of falls.[69]
However, some have some significant drawbacks that impair its use. They can be susceptible to water damage and thus great care must be taken to ensure that the prosthesis remains dry.[70]
Myoelectric
A myoelectric prosthesis uses the electrical tension generated every time a muscle contracts, as information. This tension can be captured from voluntarily contracted muscles by electrodes applied on the skin to control the movements of the prosthesis, such as elbow flexion/extension, wrist supination/pronation (rotation) or opening/closing of the fingers. A prosthesis of this type utilizes the residual neuromuscular system of the human body to control the functions of an electric powered prosthetic hand, wrist, elbow or foot.[71] This is different from an electric switch prosthesis, which requires straps and/or cables actuated by body movements to actuate or operate switches that control the movements of the prosthesis. There is no clear evidence concluding that myoelectric upper extremity prostheses function better than body-powered prostheses.[72] Advantages to using a myoelectric upper extremity prosthesis include the potential for improvement in cosmetic appeal (this type of prosthesis may have a more natural look), may be better for light everyday activities, and may be beneficial for people experiencing елес мүше ауырсыну.[72] When compared to a body-powered prosthesis, a myoelectric prosthesis may not be as durable, may have a longer training time, may require more adjustments, may need more maintenance, and does not provide feedback to the user.[72]
The USSR was the first to develop a myoelectric arm in 1958,[73] while the first myoelectric arm became commercial in 1964 by the Central Prosthetic Research Institute туралы КСРО, және таратылады Hangar Limb Factory туралы Ұлыбритания.[74][75]
Robotic prostheses

Robots can be used to generate objective measures of patient's impairment and therapy outcome, assist in diagnosis, customize therapies based on patient's motor abilities, and assure compliance with treatment regimens and maintain patient's records. It is shown in many studies that there is a significant improvement in upper limb motor function after stroke using robotics for upper limb rehabilitation.[76]In order for a robotic prosthetic limb to work, it must have several components to integrate it into the body's function: Биосенсорлар detect signals from the user's nervous or muscular systems. It then relays this information to a контроллер located inside the device, and processes feedback from the limb and actuator, e.g., position or force, and sends it to the controller. Examples include surface electrodes that detect electrical activity on the skin, needle electrodes implanted in muscle, or solid-state electrode arrays with nerves growing through them. One type of these biosensors are employed in myoelectric prostheses.
A device known as the контроллер is connected to the user's nerve and muscular systems and the device itself. It sends intention commands from the user to the actuators of the device and interprets feedback from the mechanical and biosensors to the user. The controller is also responsible for the monitoring and control of the movements of the device.
Ан атқарушы mimics the actions of a muscle in producing force and movement. Examples include a motor that aids or replaces original muscle tissue.
Targeted muscle reinnervation (TMR) is a technique in which мотор нервтері, which previously controlled бұлшықеттер on an amputated limb, are surgically rerouted such that they reinnervate a small region of a large, intact muscle, such as the pectoralis major. As a result, when a patient thinks about moving the thumb of his missing hand, a small area of muscle on his chest will contract instead. By placing sensors over the reinnervated muscle, these contractions can be made to control the movement of an appropriate part of the robotic prosthesis.[77][78]
A variant of this technique is called targeted sensory reinnervation (TSR). This procedure is similar to TMR, except that сезімтал жүйкелер are surgically rerouted to тері on the chest, rather than motor nerves rerouted to muscle. Recently, robotic limbs have improved in their ability to take signals from the human brain and translate those signals into motion in the artificial limb. ДАРПА, the Pentagon's research division, is working to make even more advancements in this area. Their desire is to create an artificial limb that ties directly into the жүйке жүйесі.[79]
Robotic arms
Advancements in the processors used in myoelectric arms have allowed developers to make gains in fine-tuned control of the prosthetic. The Boston Digital Arm is a recent artificial limb that has taken advantage of these more advanced processors. The arm allows movement in five axes and allows the arm to be programmed for a more customized feel. Жақында I-LIMB Hand, invented in Edinburgh, Scotland, by David Gow has become the first commercially available hand prosthesis with five individually powered digits. The hand also possesses a manually rotatable thumb which is operated passively by the user and allows the hand to grip in precision, power, and key grip modes.
Another neural prosthetic is Джон Хопкинс университетінің қолданбалы физика зертханасы Proto 1. Besides the Proto 1, the university also finished the Proto 2 2010 жылы.[80] Early in 2013, Max Ortiz Catalan and Rickard Brånemark of the Chalmers University of Technology, and Sahlgrenska University Hospital in Sweden, succeeded in making the first robotic arm which is mind-controlled and can be permanently attached to the body (using osseointegration ).[81][82][83]
An approach that is very useful is called arm rotation which is common for unilateral amputees which is an amputation that affects only one side of the body; and also essential for bilateral amputees, a person who is missing or has had amputated either both arms or legs, to carry out activities of daily living. This involves inserting a small permanent magnet into the distal end of the residual bone of subjects with upper limb amputations. When a subject rotates the residual arm, the magnet will rotate with the residual bone, causing a change in magnetic field distribution.[84] EEG (electroencephalogram) signals, detected using small flat metal discs attached to the scalp, essentially decoding human brain activity used for physical movement, is used to control the robotic limbs. This allows the user to control the part directly.[85]
Robotic transtibial prostheses
The research of robotic legs has made some advancement over time, allowing exact movement and control.
Зерттеушілер Чикагодағы оңалту институты announced in September 2013 that they have developed a robotic leg that translates neural impulses from the user's thigh muscles into movement, which is the first prosthetic leg to do so. It is currently in testing.[86]
Hugh Herr, head of the biomechatronics group at MIT’s Media Lab developed a robotic transtibial leg (PowerFoot BiOM).[87][88]
The Icelandic company Össur has also created a robotic transtibial leg with motorized ankle that moves through algorithms and sensors that automatically adjust the angle of the foot during different points in its wearer's stride. Also there are brain-controlled bionic legs that allow an individual to move his limbs with a wireless transmitter.[89]
Prosthesis design
The main goal of a robotic prosthesis is to provide active actuation during gait to improve the biomechanics of gait, including, among other things, stability, symmetry, or energy expenditure for amputees. There are several powered prosthetic legs currently on the market, including fully powered legs, in which actuators directly drive the joints, and semi-active legs, which use small amounts of energy and a small actuator to change the mechanical properties of the leg but do not inject net positive energy into gait. Specific examples include The emPOWER from BionX, the Proprio Foot from Ossur, and the Elan Foot from Endolite.[90][91][92] Various research groups have also experimented with robotic legs over the last decade.[93] Central issues being researched include designing the behavior of the device during stance and swing phases, recognizing the current ambulation task, and various mechanical design problems such as robustness, weight, battery-life/efficiency, and noise-level. However, scientists from Стэнфорд университеті және Сеул ұлттық университеті has developed artificial nerves system that will help prosthetic limbs feel.[94] This synthetic nerve system enables prosthetic limbs sense брайль, feel the sense of touch and respond to the environment.[95][96]
Use of recycled materials
Prosthetics are being made from recycled plastic bottles and lids around the world.[97][98][99][100][101]
Attachment to the body
Most prostheses can be attached to the exterior of the body, in a non-permanent way. Some others however can be attached in a permanent way. One such example are exoprostheses (see below).
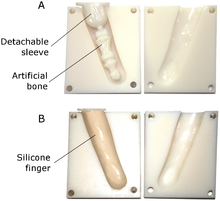
Direct bone attachment and osseointegration
Оссеоинтеграция is a method of attaching the artificial limb to the body. This method is also sometimes referred to as exoprosthesis (attaching an artificial limb to the bone), or endo-exoprosthesis.
The stump and socket method can cause significant pain in the amputee, which is why the direct bone attachment has been explored extensively. The method works by inserting a titanium bolt into the bone at the end of the stump. After several months the bone attaches itself to the titanium bolt and an abutment is attached to the titanium bolt. The abutment extends out of the stump and the (removable) artificial limb is then attached to the abutment. Some of the benefits of this method include the following:
- Better muscle control of the prosthetic.
- The ability to wear the prosthetic for an extended period of time; with the stump and socket method this is not possible.
- The ability for transfemoral amputees to drive a car.
The main disadvantage of this method is that amputees with the direct bone attachment cannot have large impacts on the limb, such as those experienced during jogging, because of the potential for the bone to break.[8]
Космезис
Cosmetic prosthesis has long been used to disguise injuries and disfigurements. With advances in modern technology, cosmesis, the creation of lifelike limbs made from силикон немесе ПВХ, has been made possible. Such prosthetics, including artificial hands, can now be designed to simulate the appearance of real hands, complete with freckles, veins, hair, fingerprints and even tattoos.Custom-made cosmeses are generally more expensive (costing thousands of U.S. dollars, depending on the level of detail), while standard cosmeses come premade in a variety of sizes, although they are often not as realistic as their custom-made counterparts. Another option is the custom-made silicone cover, which can be made to match a person's skin tone but not details such as freckles or wrinkles. Cosmeses are attached to the body in any number of ways, using an adhesive, suction, form-fitting, stretchable skin, or a skin sleeve.
Таным
Unlike neuromotor prostheses, neurocognitive prostheses would sense or modulate neural function in order to physically reconstitute or augment cognitive processes such as атқарушылық функция, назар, language, and memory. No neurocognitive prostheses are currently available but the development of implantable neurocognitive brain-computer interfaces has been proposed to help treat conditions such as инсульт, бас миының зақымдануы, церебралды сал ауруы, аутизм, және Альцгеймер ауруы.[102]The recent field of Assistive Technology for Cognition concerns the development of technologies to augment human cognition. Scheduling devices such as Neuropage remind users with memory impairments when to perform certain activities, such as visiting the doctor. Micro-prompting devices such as PEAT, AbleLink and Guide have been used to aid users with memory and executive function problems perform күнделікті өмір.
Prosthetic enhancement

In addition to the standard artificial limb for everyday use, many amputees or туа біткен patients have special limbs and devices to aid in the participation of sports and recreational activities.
Within science fiction, and, more recently, within the ғылыми қауымдастық, there has been consideration given to using advanced prostheses to replace healthy body parts with artificial mechanisms and systems to improve function. The morality and desirability of such technologies are being debated by transhumanists, other ethicists, and others in general.[103][104][105][106][кім? ] Body parts such as legs, arms, hands, feet, and others can be replaced.
The first experiment with a healthy individual appears to have been that by the British scientist Кевин Уорвик. In 2002, an implant was interfaced directly into Warwick's nervous system. The electrode array, which contained around a hundred электродтар, орналастырылды медианалық жүйке. The signals produced were detailed enough that a robot arm was able to mimic the actions of Warwick's own arm and provide a form of touch feedback again via the implant.[107]
The DEKA компаниясы Дин Камен developed the "Luke arm", an advanced nerve-controlled prosthetic. Clinical trials began in 2008,[108] with FDA approval in 2014 and commercial manufacturing by the Universal Instruments Corporation expected in 2017. The price offered at retail by Mobius Bionics is expected to be around $100,000.[109]
Further research in April 2019, there have been improvements towards prosthetic function and comfort of 3D-printed personalized wearable systems. Instead of manual integration after printing, integrating electronic sensors at the intersection between a prosthetic and the wearer's tissue can gather information such as pressure across wearer's tissue, that can help improve further iteration of the these types of prosthetic.[110]
Оскар Писториус
2008 жылдың басында, Оскар Писториус, the "Blade Runner" of South Africa, was briefly ruled ineligible to compete in the 2008 жылғы жазғы Олимпиада because his transtibial prosthesis limbs were said to give him an unfair advantage over runners who had ankles. One researcher found that his limbs used twenty-five percent less energy than those of an able-bodied runner moving at the same speed. This ruling was overturned on appeal, with the appellate court stating that the overall set of advantages and disadvantages of Pistorius' limbs had not been considered.
Pistorius did not qualify for the South African team for the Olympics, but went on to sweep the 2008 жылғы жазғы паралимпиада, and has been ruled eligible to qualify for any future Olympics.[дәйексөз қажет ] He qualified for the 2011 World Championship in South Korea and reached the semi-final where he ended last timewise, he was 14th in the first round, his personal best at 400m would have given him 5th place in the finals. At 2012 жылғы жазғы Олимпиада in London, Pistorius became the first amputee runner to compete at an Olympic Games.[111] Ол жүгірді 400 metres race semi-finals,[112][113][114] және 4 × 400 metres relay race финал.[115] He also competed in 5 events in the 2012 жылғы жазғы паралимпиада Лондонда.[116]
Дизайн мәселелері
There are multiple factors to consider when designing a transtibial prosthesis. Manufacturers must make choices about their priorities regarding these factors.
Өнімділік
Nonetheless, there are certain elements of socket and foot mechanics that are invaluable for the athlete, and these are the focus of today's high-tech prosthetics companies:
- Fit – athletic/active amputees, or those with bony residua, may require a carefully detailed socket fit; less-active patients may be comfortable with a 'total contact' fit and gel liner
- Energy storage and return – storage of energy acquired through ground contact and utilization of that stored energy for propulsion
- Energy absorption – minimizing the effect of high impact on the musculoskeletal system
- Ground compliance – stability independent of terrain type and angle
- Rotation – ease of changing direction
- Weight – maximizing comfort, balance and speed
- Suspension – how the socket will join and fit to the limb
Басқа
The buyer is also concerned with numerous other factors:
- Косметика
- Құны
- Қолданудың қарапайымдылығы
- Size availability
Cost and source freedom
High-cost
In the USA a typical prosthetic limb costs anywhere between $15,000 and $90,000, depending on the type of limb desired by the patient. With medical insurance, a patient will typically pay 10%–50% of the total cost of a prosthetic limb, while the insurance company will cover the rest of the cost. The percent that the patient pays varies on the type of insurance plan, as well as the limb requested by the patient.[117] In the United Kingdom, much of Europe, Australia and New Zealand the entire cost of prosthetic limbs is met by state funding or statutory insurance. For example, in Australia prostheses are fully funded by state schemes in the case of amputation due to disease, and by workers compensation or traffic injury insurance in the case of most traumatic amputations.[118] The Ұлттық мүгедектік сақтандыру схемасы, which is being rolled out nationally between 2017 and 2020 also pays for prostheses.
Transradial (below the elbow amputation) and transtibial prostheses (below the knee amputation) typically cost between US $ 6,000 and $8,000, while transfemoral (above the knee amputation) and transhumeral prosthetics (above the elbow amputation) cost approximately twice as much with a range of $10,000 to $15,000 and can sometimes reach costs of $35,000. The cost of an artificial limb often recurs, while a limb typically needs to be replaced every 3–4 years due to тозу of everyday use. In addition, if the socket has fit issues, the socket must be replaced within several months from the onset of pain. If height is an issue, components such as pylons can be changed.[119]
Not only does the patient need to pay for their multiple prosthetic limbs, but they also need to pay for physical and occupational therapy that come along with adapting to living with an artificial limb. Unlike the reoccurring cost of the prosthetic limbs, the patient will typically only pay the $2000 to $5000 for therapy during the first year or two of living as an amputee. Once the patient is strong and comfortable with their new limb, they will not be required to go to therapy anymore. Throughout one's life, it is projected that a typical amputee will go through $1.4 million worth of treatment, including surgeries, prosthetics, as well as therapies.[117]
Төмен баға
Low-cost above-knee prostheses often provide only basic structural support with limited function. This function is often achieved with crude, non-articulating, unstable, or manually locking knee joints. A limited number of organizations, such as the International Committee of the Red Cross (ICRC), create devices for developing countries. Their device which is manufactured by CR Equipments is a single-axis, manually operated locking polymer prosthetic knee joint.[120]
Table. List of knee joint technologies based on the literature review.[64]
| Name of technology (country of origin) | Қысқаша сипаттама | Highest level of дәлелдемелер |
|---|---|---|
| ICRC knee (Switzerland) | Single-axis with manual lock | Independent field |
| ATLAS knee (UK) | Weight-activated friction | Independent field |
| POF/OTRC knee (US) | Single-axis with ext. көмектесу | Өріс |
| DAV/Seattle knee (US) | Compliant polycentric | Өріс |
| LIMBS International M1 knee (US) | Four-bar | Өріс |
| JaipurKnee (India) | Four-bar | Өріс |
| LCKnee (Canada) | Single-axis with automatic lock | Өріс |
| None provided (Nepal) | Single-axis | Өріс |
| None provided (New Zealand) | Roto-molded single-axis | Өріс |
| None provided (India) | Six-bar with squatting | Technical development |
| Friction knee (US) | Weight-activated friction | Technical development |
| Wedgelock knee (Australia) | Weight-activated friction | Technical development |
| SATHI friction knee (India) | Weight-activated friction | Limited data available |

A plan for a low-cost artificial leg, designed by Sébastien Dubois, was featured at the 2007 International Design Exhibition and award show in Copenhagen, Denmark, where it won the Index: Award. It would be able to create an energy-return prosthetic leg for US $ 8.00, composed primarily of шыны талшық.[121]
Prior to the 1980s, foot prostheses merely restored basic walking capabilities. These early devices can be characterized by a simple artificial attachment connecting one's residual limb to the ground.
Енгізу Seattle Foot (Seattle Limb Systems ) in 1981 revolutionized the field, bringing the concept of an Energy Storing Prosthetic Foot (ESPF) to the fore. Other companies soon followed suit, and before long, there were multiple models of energy storing prostheses on the market. Each model utilized some variation of a compressible heel. The heel is compressed during initial ground contact, storing energy which is then returned during the latter phase of ground contact to help propel the body forward.
Since then, the foot prosthetics industry has been dominated by steady, small improvements in performance, comfort, and marketability.
Бірге 3D принтерлер, it is possible to manufacture a single product without having to have metal қалыптар, so the costs can be drastically reduced.[122]
Jaipur Foot, an artificial limb from Джайпур, Үндістан, costs about US$40.
Open-source robotic prothesis
There is currently an open-design Prosthetics forum known as the "Open Prosthetics Project ". The group employs collaborators and volunteers to advance Prosthetics technology while attempting to lower the costs of these necessary devices.[123] Ашық бионика is a company that is developing open-source robotic prosthetic hands. It uses 3D printing to manufacture the devices and low-cost 3D scanners to fit them, with the aim of lowering the cost of fabricating custom prosthetics. A review study on a wide range of printed prosthetic hands, found that although 3D printing technology holds a promise for individualised prosthesis design, it is not necessarily cheaper when all costs are included. The same study also found that evidence on the functionality, durability and user acceptance of 3D printed hand prostheses is still lacking.[124]
Low-cost prosthetics for children

In the USA an estimate was found of 32,500 children (<21 years) that suffer from major paediatric amputation, with 5,525 new cases each year, of which 3,315 congenital.[125]
Карр және басқалар. (1998) investigated amputations caused by landmines for Afghanistan, Bosnia and Herzegovina, Cambodia and Mozambique among children (<14 years), showing estimates of respectively 4.7, 0.19, 1.11 and 0.67 per 1000 children.[126] Mohan (1986) indicated in India a total of 424,000 amputees (23,500 annually), of which 10.3% had an onset of disability below the age of 14, amounting to a total of about 43,700 limb deficient children in India alone.[127]
Few low-cost solutions have been created specially for children. Examples of low-cost prosthetic devices include:
Pole and crutch
This hand-held pole with leather support band or platform for the limb is one of the simplest and cheapest solutions found. It serves well as a short-term solution, but is prone to rapid contracture formation if the limb is not stretched daily through a series of range-of motion (RoM) sets.[61]
Bamboo, PVC or plaster limbs
This also fairly simple solution comprises a plaster socket with a bamboo or PVC pipe at the bottom, optionally attached to a prosthetic foot. This solution prevents contractures because the knee is moved through its full RoM. The David Werner Collection, an online database for the assistance of disabled village children, displays manuals of production of these solutions.[128]
Adjustable bicycle limb
This solution is built using a bicycle seat post up side down as foot, generating flexibility and (length) adjustability. It is a very cheap solution, using locally available materials.[129]
Sathi Limb
It is an endoskeletal modular lower limb from India, which uses thermoplastic parts. Its main advantages are the small weight and adaptability.[61]
Monolimb
Monolimbs are non-modular prostheses and thus require more experienced prosthetist for correct fitting, because alignment can barely be changed after production. However, their durability on average is better than low-cost modular solutions.[130]
Cultural and social theory perspectives
A number of theorists have explored the meaning and implications of prosthetic extension of the body. Elizabeth Grosz writes, "Creatures use tools, ornaments, and appliances to augment their bodily capacities. Are their bodies lacking something, which they need to replace with artificial or substitute organs?...Or conversely, should prostheses be understood, in terms of aesthetic reorganization and proliferation, as the consequence of an inventiveness that functions beyond and perhaps in defiance of pragmatic need?"[131] Elaine Scarry argues that every artifact recreates and extends the body. Chairs supplement the skeleton, tools append the hands, clothing augments the skin.[132] In Scarry's thinking, "furniture and houses are neither more nor less interior to the human body than the food it absorbs, nor are they fundamentally different from such sophisticated prosthetics as artificial lungs, eyes and kidneys. The consumption of manufactured things turns the body inside out, opening it up дейін және сияқты the culture of objects."[133] Марк Уигли, a professor of architecture, continues this line of thinking about how architecture supplements our natural capabilities, and argues that "a blurring of identity is produced by all prostheses."[134] Some of this work relies on Фрейд 's earlier characterization of man's relation to objects as one of extension.
Notable users of prosthetic devices
- Marie Moentmann (1900–1974), child survivor of industrial accident
Сондай-ақ қараңыз
Пайдаланылған әдебиеттер
Дәйексөздер
- ^ πρόσθεσις. Лидделл, Генри Джордж; Скотт, Роберт; Грек-ағылшын лексикасы кезінде Персей жобасы
- ^ Nathan, Stuart (28 November 2018). "Prosthetic implant provides realistic wrist movement to amputees". Алынған 2019-01-30.
- ^ "Prosthetic implants – Prosthetic limbs and body parts – Plastic surgery – Services A-Z – Services". www.royalfree.nhs.uk. Алынған 2019-01-30.
- ^ а б "How artificial limb is made – material, manufacture, making, used, parts, components, structure, procedure". www.madehow.com. Алынған 2017-10-24.
- ^ "Physical Medicine and Rehabilitation Treatment Team". Department of Rehabilitation and Regenerative Medicine. Алынған 2019-02-24.
- ^ "4: Prosthetic Management: Overview, Methods, and Materials | O&P Virtual Library". www.oandplibrary.org. Алынған 2017-10-24.
- ^ а б Maat, Bartjan; Smit, Gerwin; Plettenburg, Dick; Breedveld, Paul (1 March 2017). "Passive prosthetic hands and tools: A literature review". Prosthetics and Orthotics International. 42 (1): 66–74. дои:10.1177/0309364617691622. PMC 5810914. PMID 28190380.
- ^ а б в "Getting an artificial leg up – Cathy Johnson". Австралиялық хабар тарату корпорациясы. Алынған 2010-10-03.
- ^ Highsmith, M. Jason; Andrews, Casey R.; Millman, Claire; Fuller, Ashley; Kahle, Jason T.; Klenow, Tyler D.; Lewis, Katherine L.; Bradley, Rachel C.; Orriola, John J. (2016-09-16). "Gait Training Interventions for Lower Extremity Amputees: A Systematic Literature Review". Technology & Innovation. 18 (2–3): 99–113. дои:10.21300/18.2-3.2016.99. PMC 5218520. PMID 28066520.
- ^ а б в Barr, Steven; Howe, Tracey E. (2018). "Prosthetic rehabilitation for older dysvascular people following a unilateral transfemoral amputation". Cochrane жүйелік шолулардың мәліметтер базасы. 10: CD005260. дои:10.1002/14651858.CD005260.pub4. ISSN 1469-493X. PMC 6517199. PMID 30350430.
- ^ Bowker, John H.; Michael, John W. (2002). Atlas of limb prosthetics : surgical, prosthetic, and rehabilitation principles. American Academy of Orthopaedic Surgeons (2nd ed.). St. Louis: Mosby Year Book. pp. 389, 413, 429, 479, 501, 535, 885. ISBN 978-0892032754. OCLC 54693136.
- ^ а б Söderberg, Bengt (2001). Partial foot amputations (2-ші басылым). Sweden: Centre for Partial Foot Amputees. б. 21. ISBN 978-9163107566. OCLC 152577368.
- ^ "An Amazing Menagerie of Animal Prostheses".
- ^ Pine, Keith R.; Sloan, Brian H.; Jacobs, Robert J. (2015). Clinical Ocular Prosthetics. Спрингер. ISBN 9783319190570.
- ^ "No. 1705: A 3000-Year-Old Toe". Uh.edu. 2004-08-01. Алынған 2013-03-13.
- ^ Vanderwerker, Earl E., Jr. (1976). "A Brief Review of the History of Amputations and Prostheses". ICIB. 15 (5): 15–16. Архивтелген түпнұсқа 2007-10-14.CS1 maint: бірнеше есімдер: авторлар тізімі (сілтеме)
- ^ Rosenfeld, Amnon; Dvorachek, Michael; Rotstein, Ilan (July 2000). "Bronze Single Crown-like Prosthetic Restorations of Teeth from the Late Roman Period". Археологиялық ғылымдар журналы. 27 (7): 641–644. дои:10.1006/jasc.1999.0517.
- ^ Геродот, Тарихтар. 9.37
- ^ "The Iron Hand of the Goetz von Berlichingen". Karlofgermany.com. Алынған 2009-11-03.
- ^ Finch, Jacqueline (February 2011). "The ancient origins of prosthetic medicine". Лансет. 377 (9765): 548–9. дои:10.1016/s0140-6736(11)60190-6. PMID 21341402.
- ^ Bryce, Geore (1887). A Short History of the Canadian People. London: S. Low, Marston, Searle & Rivington.
- ^ Friedman, Lawrence (1978). The Psychological Rehabilitation of the Amputee. Springfield, IL.: Charles C. Thomas.
- ^ Старр, Мишель. "This Medieval Italian Man Replaced His Amputated Hand With a Weapon". ScienceAlert. Алынған 2018-04-17.
- ^ а б Micarelli, I; Paine, R; Giostra, C; Tafuri, MA; Profico, A; Boggioni, M; Di Vincenzo, F; Massani, D; Papini, A; Manzi, G (31 December 2018). "Survival to amputation in pre-antibiotic era: a case study from a Longobard necropolis (6th-8th centuries AD)". Антропологиялық ғылымдар журналы. 96 (96): 185–200. дои:10.4436/JASS.96001. PMID 29717991.
- ^ а б Киллгроув, Кристина. "Archaeologists Find Ancient Knife-Hand Prosthesis on Medieval Warrior". Forbes. Алынған 2018-04-17.
- ^ "The History of Prosthetics". UNYQ. 2015-09-21. Алынған 2018-04-17.
- ^ Romm, Sharon (July 1989). "Arms by Design". Пластикалық және қалпына келтіру хирургиясы. 84 (1): 158–63. дои:10.1097/00006534-198907000-00029. PMID 2660173.
- ^ "A Brief History of Prosthetics". inMotion: A Brief History of Prosthetics. November–December 2007. Алынған 23 қараша 2010.
- ^ Bigg, Henry Robert Heather (1885) Artificial Limbs and the Amputations which Afford the Most Appropriate Stumps in Civil and Military Surgery. Лондон
- ^ Long, Ivan A. (1985). "Normal Shape-Normal Alignment (NSNA) Above-Knee Prosthesis | O&P Virtual Library". Clinical Prosthetics & Orthotics. 9 (4): 9–14.
- ^ Gottschalk, Frank A.; Kourosh, Sohrab; Stills, Melvin; McClellan, Bruce; Roberts, Jim (Oct 1989). "Does Socket Configuration Influence the Position of the Femur in Above-Knee Amputation?". Journal of Prosthetics and Orthotics. 2 (1): 94. дои:10.1097/00008526-198910000-00009.
- ^ “Blatchford Company History”, Blatchford Group.
- ^ а б Pike, Alvin (May/June 1999). "The New High Tech Prostheses". InMotion Magazine 9 (3)
- ^ One small step for an amputee and a giant leap for Amparo and GDI Hub
- ^ Changing Prosthetic Service Delivery with Amparo
- ^ Johannes, Matthew S.; Bigelow, John D.; Burck, James M.; Harshbarger, Stuart D.; Kozlowski, Matthew V.; Van Doren, Thomas (2011). "An Overview of the Developmental Process for the Modular Prosthetic Limb" (PDF). Джон Хопкинс APL техникалық дайджесті. 30 (3): 207–16.
- ^ Adee, Sally (January 2009). "The revolution will be prosthetized". IEEE спектрі. 46 (1): 44–8. дои:10.1109/MSPEC.2009.4734314.
- ^ Burck, James M.; Bigelow, John D.; Harshbarger, Stuart D. (2011). "Revolutionizing Prosthetics: Systems Engineering Challenges and Opportunities". Джон Хопкинс APL техникалық дайджесті. 30 (3): 186–97. CiteSeerX 10.1.1.685.6772.
- ^ Bogue, Robert (21 August 2009). "Exoskeletons and robotic prosthetics: a review of recent developments". Industrial Robot. 36 (5): 421–427. дои:10.1108/01439910910980141.
- ^ Miranda, Robbin A.; Casebeer, William D.; Hein, Amy M.; Judy, Jack W.; Krotkov, Eric P.; Laabs, Tracy L.; Manzo, Justin E.; Pankratz, Kent G.; Pratt, Gill A.; Sanchez, Justin C.; Weber, Douglas J.; Wheeler, Tracey L.; Ling, Geoffrey S.F. (Сәуір 2015). "DARPA-funded efforts in the development of novel brain–computer interface technologies". Неврология ғылымдарының әдістері журналы. 244: 52–67. дои:10.1016/j.jneumeth.2014.07.019. PMID 25107852.
- ^ "The Pentagon's Bionic Arm". CBS жаңалықтары. Алынған 9 мамыр 2015.
- ^ "Custom Prosthetics, Artificial Limbs LI, NY | Progressive O&P". Progoandp.com. Алынған 2016-12-28.
- ^ а б в "How artificial limb is made – Background, Raw materials, The manufacturing process of artificial limb, Physical therapy, Quality control". Madehow.com. 1988-04-04. Алынған 2010-10-03.
- ^ Mamalis, AG; Ramsden, JJ; Grabchenko, AI; Lytvynov, LA; Filipenko, VA; Lavrynenko, SN (2006). "A novel concept for the manufacture of individual sapphire-metallic hip joint endoprostheses". Journal of Biological Physics and Chemistry. 6 (3): 113–117. дои:10.4024/30601.jbpc.06.03.
- ^ Raspopovic S1, Capogrosso M, Petrini FM; т.б. (Jan 2014). "Restoring natural sensory feedback in real-time bidirectional hand prostheses". Ғылыми. Аударма Мед. 6 (222): 222. дои:10.1126/scitranslmed.3006820. PMID 24500407.CS1 maint: бірнеше есімдер: авторлар тізімі (сілтеме)
- ^ "With a new prosthetic, researchers have managed to restore the sense of touch for a Denmark man who lost his left hand nine years ago.", USA Today, February 5, 2014
- ^ "Artificial hand offering immediate touch response a success", Channelnewsasia, February 7, 2014
- ^ DelViscio, Jeffery. "A Robot Hand Helps Amputees “Feel” Again". Ғылыми американдық. Алынған 2020-06-12.
- ^ Smit G, Plettenburg DH (2010). "Efficiency of Voluntary Closing Hand and Hook Prostheses". Prosthetics and Orthotics International. 34 (4): 411–427. дои:10.3109/03093646.2010.486390. PMID 20849359.
- ^ Smit, G; Bongers, RM; Van der Sluis, CK; Plettenburg, DH (2012). "Efficiency of voluntary opening hand and hook prosthetic devices: 24 years of development?". Journal of Rehabilitation Research and Development. 49 (4): 523–534. дои:10.1682/JRRD.2011.07.0125. PMID 22773256.
- ^ Disabled Hands Successfully Replaced with Bionic Prosthetics
- ^ Algorithm for bionic hand reconstruction in patients with global brachial plexopathies
- ^ 3D bionic hands
- ^ UK woman can ride bike for first time with 'world's most lifelike bionic hand'
- ^ Bebionic robotic hand
- ^ A helping hand: EU researchers develop bionic hand that imitates life
- ^ Onken, Sarah. "Dive In". cityviewnc.com. Архивтелген түпнұсқа 2015 жылғы 10 қыркүйекте. Алынған 24 тамыз 2015.
- ^ Ephraim, P. L.; Dillingham, T. R.; Sector, M; Pezzin, L. E.; MacKenzie, E. J. (2003). "Epidemiology of limb loss and congenital limb deficiency: A review of the literature". Физикалық медицина және оңалту мұрағаты. 84 (5): 747–61. дои:10.1016/S0003-9993(02)04932-8. PMID 12736892.
- ^ Mak, A. F.; Zhang, M; Boone, D. A. (2001). "State-of-the-art research in lower-limb prosthetic biomechanics-socket interface: A review". Journal of Rehabilitation Research and Development. 38 (2): 161–74. PMID 11392649.
- ^ Legro, MW; Reiber, G; del Aguila, M; Ajax, MJ; Boone, DA; Larsen, JA; Смит, Д.Г.; Sangeorzan, B (July 1999). "Issues of importance reported by persons with lower limb amputations and prostheses". Journal of Rehabilitation Research and Development. 36 (3): 155–63. PMID 10659798.
- ^ а б в Strait, E. (2006) Prosthetics in Developing Countries. oandp.org Retrieved 2019-03-11
- ^ Stark, Gerald (2005). "Perspectives on How and Why Feet are Prescribed". Journal of Prosthetics and Orthotics. 17: S18–S22. дои:10.1097/00008526-200510001-00007.
- ^ Jian, Yuancheng; Winter, DA; Ishac, MG; Gilchrist, L (1993). "Trajectory of the body COG and COP during initiation and termination of gait". Gait & Posture. 1: 9–22. дои:10.1016/0966-6362(93)90038-3.
- ^ а б Andrysek, Jan (December 2010). "Lower-limb prosthetic technologies in the developing world: A review of literature from 1994–2010". Prosthetics and Orthotics International. 34 (4): 378–398. дои:10.3109/03093646.2010.520060. PMID 21083505.
- ^ а б Hofstad, Cheriel J; van der Linde, Harmen; van Limbeek, Jacques; Postema, Klaas (26 January 2004). "Prescription of prosthetic ankle-foot mechanisms after lower limb amputation" (PDF). Cochrane жүйелік шолулардың мәліметтер базасы (1): CD003978. дои:10.1002/14651858.CD003978.pub2. PMID 14974050.
- ^ "The SLK, The Self-Learning Knee" Мұрағатталды 2012-04-25 сағ Wayback Machine, DAW Industries. Retrieved 16 March 2008.
- ^ Marriott, Michel (2005-06-20). "Titanium and Sensors Replace Ahab's Peg Leg". The New York Times. Алынған 2008-10-30.
- ^ Martin, Craig W. (November 2003) "Otto Bock C-leg: A review of its effectiveness" Мұрағатталды 2016-12-28 күндері Wayback Machine. WCB Evidence Based Group
- ^ а б Kannenberg, Andreas; Zacharias, Britta; Pröbsting, Eva (2014). "Benefits of microprocessor-controlled prosthetic knees to limited community ambulators: Systematic review". Journal of Rehabilitation Research and Development. 51 (10): 1469–1496. дои:10.1682/JRRD.2014.05.0118. PMID 25856664.
- ^ Highsmith, M. Jason; Kahle, Jason T.; Bongiorni, Dennis R.; Sutton, Bryce S.; Groer, Shirley; Kaufman, Kenton R. (December 2010). "Safety, Energy Efficiency, and Cost Efficacy of the C-Leg for Transfemoral Amputees: A Review of the Literature". Prosthetics and Orthotics International. 34 (4): 362–377. дои:10.3109/03093646.2010.520054. PMID 20969495.
- ^ "Amputees control bionic legs with their thoughts". Reuters. 20 мамыр 2015 ж.
- ^ а б в Carey, Stephanie L.; Lura, Derek J.; Highsmith, M. Jason; CP.; FAAOP. (2015). "Differences in myoelectric and body-powered upper-limb prostheses: Systematic literature review". Journal of Rehabilitation Research and Development. 52 (3): 247–262. дои:10.1682/JRRD.2014.08.0192. PMID 26230500.
- ^ Wirta, R. W.; Taylor, D. R.; Finley, F. R. (1978). "Pattern-recognition arm prosthesis: A historical perspective-a final report" (PDF). Bulletin of Prosthetics Research: 8–35. PMID 365281.
- ^ Sherman, E. David (1964). "A Russian Bioelectric-Controlled Prosthesis: Report of a Research Team from the Rehabilitation Institute of Montreal". Канадалық медициналық қауымдастық журналы. 91 (24): 1268–1270. PMC 1927453. PMID 14226106.
- ^ Muzumdar, Ashok (2004). Powered Upper Limb Prostheses: Control, Implementation and Clinical Application. Спрингер. ISBN 978-3-540-40406-4.
- ^ Reinkensmeyer David J (2009). "Robotic Assistance For Upper Extremity Training After Stroke" (PDF). Денсаулық сақтау технологиялары және информатика саласындағы зерттеулер. 145: 25–39. PMID 19592784. Архивтелген түпнұсқа (PDF) 2016-12-28 күндері. Алынған 2016-12-28.
- ^ Kuiken TA, Miller LA, Lipschutz RD, Lock BA, Stubblefield K, Marasco PD, Zhou P, Dumanian GA (February 3, 2007). "Targeted reinnervation for enhanced prosthetic arm function in a woman with a proximal amputation: a case study". Лансет. 369 (9559): 371–80. дои:10.1016/S0140-6736(07)60193-7. PMID 17276777.
- ^ "Blogs: TR Editors' blog: Patients Test an Advanced Prosthetic Arm". Технологиялық шолу. 2009-02-10. Алынған 2010-10-03.
- ^ "Defense Sciences Office". Darpa.mil. Архивтелген түпнұсқа 2009-04-26. Алынған 2010-10-03.
- ^ "Proto 1 and Proto 2". Ric.org. 2007-05-01. Архивтелген түпнұсқа 2011-07-27. Алынған 2010-10-03.
- ^ "World premiere of muscle and nerve controlled arm prosthesis". Sciateaily.com. Ақпан 2013. Алынған 2016-12-28.
- ^ Williams, Adam (2012-11-30). "Mind-controlled permanently-attached prosthetic arm could revolutionize prosthetics". Gizmag.com. Алынған 2016-12-28.
- ^ Ford, Jason (2012-11-28). "Trials imminent for implantable thought-controlled robotic arm". Theengineer.co.uk. Алынған 2016-12-28.
- ^ Li, Guanglin; Kuiken, Todd A (2008). "Modeling of Prosthetic Limb Rotation Control by Sensing Rotation of Residual Arm Bone". Биомедициналық инженерия бойынша IEEE транзакциялары. 55 (9): 2134–2142. дои:10.1109 / tbme.2008.923914. PMC 3038244. PMID 18713682.
- ^ Contreras-Vidal José L.; т.б. (2012). «Дененің бүкіл қозғалысын қалпына келтіру: инвазивті емес ми-машиналық интерфейс жүйесіне». IEEE импульсі. 3 (1): 34–37. дои:10.1109 / mpul.2011.2175635. PMC 3357625. PMID 22344949.
- ^ «Чикагодағы оңалту институты бірінші болып ойланатын басқарылатын роботтық аяқты дамытады». Medgadget.com. Қыркүйек 2013. Алынған 2016-12-28.
- ^ Бұл робот аяқтарының болашағы ма?
- ^ «Транстибиальды протездер». Биомехатроника. MIT Media Lab.
- ^ «Миға бақыланатын бионикалық аяқтар осында». Ғылыми-көпшілік. Алынған 2018-12-01.
- ^ «Home - BionX Medical Technologies». www.bionxmed.com. Алынған 2018-01-08.
- ^ Өссұр. «PROPRIO FOOT». www.ossur.com. Алынған 2018-01-08.
- ^ «Элан - Көміртегі, Аяқ, Гидравликалық - Эндолит АҚШ - Төменгі аяғындағы протездеу». Эндолит АҚШ - Төменгі аяғындағы протездеу. Алынған 2018-01-08.
- ^ Виндрих, Майкл; Гриммер, Мартин; Мәсіх, Оливер; Риндернехт, Стефан; Беккерле, Филиппик (19 желтоқсан 2016). «Төменгі аяқтың протездеуі: дизайн мәселелері мен шешімдерін жүйелі түрде қарау». BioMedical Engineering OnLine. 15 (S3): 140. дои:10.1186 / s12938-016-0284-9. PMC 5249019. PMID 28105948.
- ^ ENGINEERING.com. «Зерттеушілер жасанды жүйке жүйесін жасайды». www.engineering.com. Алынған 2018-06-08.
- ^ «Стэнфорд зерттеушілері роботтар үшін жасанды жүйке жүйесін жасайды - Синьхуа | English.news.cn». www.xinhuanet.com. Алынған 2018-06-08.
- ^ Университет, Стэнфорд (2018-05-31). «Жасанды жүйке жүйесі протездік құрылғылар мен роботтарға жанасу сезімін береді | Стэнфорд жаңалықтары». Стэнфорд жаңалықтары. Алынған 2018-06-08.
- ^ «Қайта өңделген пластикалық қалдықтардан жасалған қол жетімді протездеу». Материал ауданы. 14 қаңтар 2019. Алынған 3 қараша 2020.
- ^ «Бұл зерттеушілер пластикалық бөтелкелерді протездік аяқ-қолдарға айналдырып жатыр». Дүниежүзілік экономикалық форум. 4 қазан 2019. Алынған 3 қараша 2020.
- ^ Белл, Сара Джейн (21 сәуір 2019). «Протезді аяқ-қолдар жасау үшін шампунь бөтелкелерін қайта өңдеу зейнеткердің арманына айналады». ABC News. Австралиялық хабар тарату корпорациясы. Алынған 3 қараша 2020.
- ^ Конвей, Элле (26 маусым 2019). «Канберра отбасы бөтелке қақпағын балалар үшін пластикалық қолдарға айналдырады». ABC News. Австралиялық хабар тарату корпорациясы. Алынған 3 қараша 2020.
- ^ «Қолды елестету». Елестету. 19 ақпан 2020. Алынған 3 қараша 2020.
- ^ Serruya MD, Кахана МДж (2008). «Танымды қалпына келтіру әдістері мен құралдары». Behav Brain Res. 192 (2): 149–65. дои:10.1016 / j.bbr.2008.04.007. PMC 3051349. PMID 18539345.
- ^ «Жақсартулар, Оксфорд Уехиро практикалық этика орталығы». Practicalethics.ox.ac.uk. Архивтелген түпнұсқа 2016-12-28 күндері. Алынған 2016-12-28.
- ^ Каплан, Артур; Эллиотт, Карл (2004). «Бізді жақсылықтан гөрі жақсарту үшін жақсарту технологияларын қолдану этикалық па?». PLOS Медицина. 1 (3): e52. дои:10.1371 / journal.pmed.0010052. PMC 539045. PMID 15630464.
- ^ Бьюкенен, Аллен Э. (2011). Адамзаттан тыс?. дои:10.1093 / acprof: oso / 9780199587810.001.0001. ISBN 9780199587810.
- ^ Аномалия, Джонни (2012). «Адамзаттан тыс? Биомедициналық жетілдіру этикасы - Аллен Бьюкененнің авторы». Биоэтика. 26 (7): 391–392. дои:10.1111 / j.1467-8519.2012.01964.x.
- ^ Уорвик К, Гэссон М, Хатт Б, Гудью I, Киберд П, Эндрюс Б, Тедди П, Шад А (2003). «Имплантат технологиясын кибернетикалық жүйелерге қолдану». Неврология архиві. 60 (10): 1369–1373. дои:10.1001 / archneur.60.10.1369. PMID 14568806.
- ^ Adee, Сара (2008-02-01). «Дин Каменнің» Люк Арм «клиникалық сынақтарға арналған протездік дайындықтары». IEEE спектрі.
- ^ «DARPA-ның қолмен жасалынатын протездік дайындықтарын коммерциялық іске қосу үшін дайындық».
- ^ Гарнер, Кортни (2019-04-05). «Таза жүйелік интерфейстер: электронды датчиктерді жақсартылған 3D басылған протездеуге қалай қосуға болады?». SciTech Europa. Алынған 2019-05-06.
- ^ Роберт Клемко (10 тамыз 2012), «Оскар Писториус тарихты жазады, медальсіз қалады», USA Today, мұрағатталған түпнұсқа 2012 жылғы 11 тамызда
- ^ Оскар Писториус Лондон-2012 Олимпиада тарихын 400 метр қашықтықта жасайды, BBC Sport, 4 тамыз 2012 ж
- ^ Билл Чаппелл (2012 жылғы 4 тамыз), Оскар Писториус Олимпиада тарихын 400 метрге жүгіріп өтіп, жартылай финалға өтті, Ұлттық әлеуметтік радио, мұрағатталған түпнұсқа 2012 жылғы 4 тамызда
- ^ «Ерлер арасындағы 400м - жартылай финал», london2012.com, мұрағатталған түпнұсқа 2012 жылғы 16 желтоқсанда, алынды 4 тамыз 2012
- ^ Гринберг, Крис (10 тамыз 2012), «Оскар Писториус, Оңтүстік Африка 4 × 400 метрлік эстафеталық команда 8-ші орынға ие болды, өйткені Багам аралдары алтын жеңіп алды», Huffington Post, мұрағатталған түпнұсқа 2012 жылғы 10 тамызда
- ^ Хокинг пен Писториус Лондондағы паралимпиаданы ашты: мүгедектер арбасына таңылған физик Стивен Хокинг спортшыларды «жұлдыздарға қараңдар» деп шақырды, өйткені ол сатылымға шыққан жерлерде 11 күн бойы рекорд орнататын Паралимпиада ойындарын ашуға көмектесті., Yahoo! Спорт, 30 тамыз 2012 ж., Мұрағатталған түпнұсқа 2012 жылдың 2 қыркүйегінде
- ^ а б «Протездеу мүшесінің құны». Құны көмекші денсаулық. Алынған 13 сәуір 2015.
- ^ «Протезге қаражат». Limbs4life. Limbs4life. Алынған 28 қаңтар 2018.
- ^ «Протездеу құны пікірталас тудырады», Бостон Глоб, 5 шілде 2005 ж. 11 ақпан 2007 ж. Алынды.
- ^ «ХҚКК: транс-феморальды протездеу - өндірістік нұсқаулық» (PDF). Алынған 2010-10-03.
- ^ ИНДЕКС: 2007 ИНДЕКС: СЫЙЛЫҚ Мұрағатталды 2009 жылдың 2 ақпаны, сағ Wayback Machine
- ^ Нагата, Казуаки (2015-05-10). «Протездеуді қол жетімді ету үшін роботты іске қосу 3-өлшемді принтерді түртеді». Japan Times Online. Japantimes.co.jp. Алынған 2016-12-28.
- ^ «Ашық протездеу сайты». Openprosthetics.org. Алынған 2016-12-28.
- ^ он Кейт, Джель; Смит, Гервин; Breedveld, Paul (2 ақпан 2017). «3D-басып шығарылған жоғарғы аяқ протездері: шолу». Мүгедектік және оңалту: көмекші технология. 12 (3): 300–314. дои:10.1080/17483107.2016.1253117. PMID 28152642.
- ^ Кребс, Д. Е .; Эдельштейн, Дж. Э .; Торнби, М.А. (1991). «Аяқ-қолы жетіспейтін балаларды протездеу». Физикалық терапия. 71 (12): 920–34. дои:10.1097/01241398-199205000-00033. PMID 1946626.
- ^ Карр, Д.Б. (1998). «Минаның зақымдануынан ауырсыну және қалпына келтіру» (PDF). Анестезиядағы жаңарту. 6 (2): 91.
- ^ Мохан, Д. (1986) Үндістандағы ампутаттар туралы есеп. oandplibrary.org
- ^ Вернер, Дэвид. Мүгедек ауыл балалары. dinf.ne.jp
- ^ Cheng, V. (2004) Жәбірленушіге көмек шешімі. Карлтон университеті, өнеркәсіптік дизайн мектебі.
- ^ Ли, Уинсон С .; Чжан, Мин (2005-08-01). «Ақырлы элементтерді модельдеу және статистикаға негізделген Тагучи әдісін қолдана отырып монолимб жобалау». Клиникалық биомеханика. 20 (7): 759–766. дои:10.1016 / j.clinbiomech.2005.03.015. ISSN 0268-0033. PMID 15963612.
- ^ Grosz, Elizabeth (2003). «Протездік заттар» ХХІ ғасырдың басындағы сәулет жағдайы. 96-97 бет. Monacelli Press. ISBN 1580931340.
- ^ Скарри, Элейн (1985). Ауырған дене: әлемді жасау және жасау. Оксфорд университетінің баспасы.
- ^ Люптон және Миллер (1992). «Түзету: қалдықтардың эстетикасы» Тейлор, М. және Престон, Дж. (Ред.) 2006 ж. Intimus: интерьер дизайны теориясының оқырманы. 204–212 бет. ISBN 978-0-470-01570-4.
- ^ Уигли, Марк (1991). «Протездік теория: сәулет пәні». Жинақ (15): 6–29. дои:10.2307/3171122. JSTOR 3171122.
Дереккөздер
- Мердок, Джордж; Уилсон, А.Беннетт, кіші (1997). Ампутациялар мен жасанды аяқтар туралы праймер. Америка Құрама Штаттары: Charles C Thomas Publisher, Ltd. 3–31 бб. ISBN 978-0-398-06801-1.
- ‘Жүгірудің биомеханикасы: дұрыс емес қозғалыс түрлерінен жарақат алады. Спорттық жарақат туралы бюллетень.
- Протездік аяқтар. Қазіргі даму жағдайы. Физикалық терапия 68 (12) желтоқсан 1988 ж.: 1874–1881.
- Гейли, Роберт. Ампутты жүгірудің биомеханикасы. Қазан 2002.
- Хафнер Б. Дж .; Сандерс Дж .; Черницки Дж. М .; Фергюсон Дж. (2002). «Транстибиалды энергияны жинақтайтын және қайтаратын протездік қондырғылар: Энергетикалық түсініктерге шолу және ұсынылған номенклатура». Реабилитациялық зерттеулер мен әзірлемелер журналы. 39 (1): 1–11. PMID 11926321.
Сыртқы сілтемелер
- Ауғандық мүгедектер өздерінің оқиғаларын Техастағы кездесуде айтады, Фейетвилл бақылаушысы
- Қазіргі протездеу жанасу сезімін қалпына келтіруге көмектесе ала ма?, PBS Newshour
- Рикке арналған қол, Фейетвилл бақылаушысы
- Протез дегеніміз не, протездік аяқ-қол және оның әр түрлі компоненті
| Негізгі тақырыптар | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Тәсілдер | |||||||||||
| Құқық, заң, қолдау |
| ||||||||||
| Құрылымдық және көмекші | |||||||||||
| Әлеуметтік мәселелер | |||||||||||
| Өнер, бұқаралық ақпарат құралдары, мәдениет, спорт | |||||||||||
| |||||||||||