Сезімталдық - Tensegrity

| ||
| ||
| ||
| ||
| ||
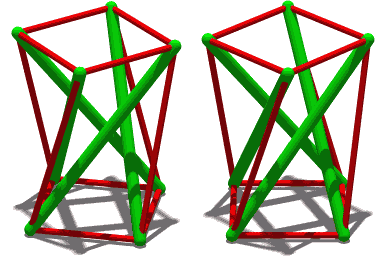
| Анимация Ұқсас құрылым, бірақ төрт қысу мүшесі бар. |
Сезімталдық, созылу тұтастығы немесе өзгермелі қысу Бұл құрылымдық астында оқшауланған компоненттер жүйесіне негізделген принцип қысу үздіксіз желі ішінде шиеленіс және қысылған мүшелер (әдетте штангалар немесе тіректер) бір-біріне тиіп тұрмайтындай етіп орналастырылған алдын-ала басылған керілген мүшелер (әдетте кабельдер немесе сіңірлер) жүйені кеңістіктен ажыратады.[1]
Терминді ұсынған Бакминстер Фуллер 1960 жылдары а портманто «шиеленісті тұтастық».[2] Тенгрессияның басқа номиналы, өзгермелі қысу, негізінен конструктивист суретші қолданған Кеннет Снелсон.
Тұжырымдама
Tensegrity құрылымдары бірнеше қарапайым дизайн үлгілерін біріктіруге негізделген:
- таза сығылуға немесе таза керілуге жүктелген мүшелер, яғни кабельдер шыққан кезде немесе шыбықтар қысылған жағдайда ғана құрылым істен шығады. Бұл әрбір мүшенің материалдық қасиеттері мен көлденең қимасының геометриясын оның жүктемесіне сәйкес оңтайландыруға мүмкіндік береді.
- алдын ала жүктеу немесе созылу пресс-стресс кабельдердің әрдайым шиеленісуіне, құрылымдық тұтастығын сақтауға мүмкіндік береді.
- механикалық тұрақтылық, бұл құрылымға кернеу күшейген сайын мүшелердің созылуына / қысылуына мүмкіндік береді. Сондай-ақ, кабельдің кернеуі жоғарылаған сайын құрылым қатая түседі.
Осы заңдылықтардың арқасында ешқандай құрылымдық мүше a иілу сәті және жүйеде ығысу кернеулері болмайды. Бұл олардың массасы мен компоненттердің көлденең қимасы үшін өте берік және қатаң құрылымдар жасай алады. Қандай да бір кернеу құрылымдарының жүктелуі ан ауксетикалық жауап және теріс Пуассон қатынасы, мысалы. T3-призмасы және 6-струттық кернеулі икосаэдр.

Тұздықтың концептуалды құрылыс материалы 1951 ж Skylon. Алты кабельдер, әр ұшында үш, мұнараны өз орнында ұстаңыз. Төменгі жағына қосылған үш кабель оның орнын «анықтайды». Қалған үш кабель оны тек тік күйде ұстайды.
Үш таяқшалы кернеулік құрылымы (оң жақта көрсетілген) осы қарапайым құрылымға негізделеді: әр жасыл таяқшаның ұштары Скайлонның жоғарғы және төменгі жағына ұқсайды. Кез-келген екі кабель арасындағы бұрыш 180 ° -тан кіші болғанша, штанганың орны жақсы анықталған. Тұрақтылық үшін үш кабель минимум болса, эстетикалық мақсаттар үшін немесе қосымша тұрақтылық үшін әр түйінге қосымша кабельдер қосылуы мүмкін. Мысалы, Snelson's Ине мұнарасы әрқайсысы 5 кабельге жалғанған түйіндердің көмегімен салынған қайталанатын үлгіні қолданады.
Элеонора Хартни көрнекі мөлдірлікті осы құрылымдардың маңызды эстетикалық сапасы ретінде көрсетеді.[3] Қорқмаз т.б.[4][5] жеңіл тенгрессиялық құрылымдардың жарамды екенін алға тартты адаптивті сәулет.
Қолданбалар
Tensegrities архитектурада қолданудың кеңеюін 1960 ж. Бастап, қашан бастады Мачей Гинтовт және Мачей Красининский жобаланған Сподек арена кешені Катовице, Польша ), шиеленісу принципін қолданған алғашқы құрылымдардың бірі ретінде. Төбесінде оның шеңберін ұстап тұратын кабельдер жүйесі тексеретін көлбеу беті қолданылады. Tensegrity принциптері де қолданылды Дэвид Гейгер Сеул Олимпиада гимнастикасы (үшін 1988 жылғы жазғы Олимпиада ), және Джорджия күмбезі (үшін 1996 жылғы жазғы Олимпиада ). Тропикана өрісі Тампа Бэй Рейс жоғары лигасының бейсбол командасының үйі, сондай-ақ үлкен кернеулік құрылымымен бекітілген күмбез төбесі бар.

2009 жылдың 4 қазанында Курилпа көпірі арқылы ашылды Брисбен өзені жылы Квинсленд, Австралия. Кернеулік қағидаттарына негізделген көпқабатты, аспалы құрылым, бұл қазіргі уақытта әлемдегі ең үлкен кернеу көпірі болып табылады.

2000 жылдардың басынан бастап Tensegrities жеңіл және серпімді роботтарды жобалау мүмкіндігіне байланысты роботисттердің қызығушылығын тудырды. Көптеген зерттеулер tensegrity роверлерін, био-имитациялық роботтарды және модульді жұмсақ роботтарды зерттеді. Tensegrity-дің ең танымал роботы - Super Ball[6], ғарышты зерттеуге арналған ровер NASA Ames.
Биология
Доктор Стивен Левин ұсынған биотенегрегенттілік - бұл биологиялық құрылымдарға тенгрессия принциптерін қолдану.[7] Сияқты биологиялық құрылымдар бұлшықеттер, сүйектер, фассия, байламдар және сіңірлер, немесе қатты және серпімді жасушалық мембраналар, керілген және сығылған бөліктердің унисонымен берік болады. The тірек-қимыл аппараты бұлшықеттер мен дәнекер тіндердің үздіксіз желісіндегі кернеуді сақтайды[8], ал сүйектер үзіліссіз қысуды қолдайды. Тіпті адамның омыртқасы, бұл бір қарағанда стек сияқты көрінеді омыртқалар бір-біріне сүйенетін, бұл шын мәнінде шиеленіс құрылымы.[9]
Дональд Э. Ингбер байқалған көптеген құбылыстарды сипаттау үшін шиеленіс теориясын жасады молекулалық биология.[10] Мысалы, жасушалардың көрсетілген пішіндері, мейлі олардың қысымға реакциясы, субстраттармен өзара әрекеттесуі және т.б., бәрін ұяшықтың бейнесі арқылы математикалық модельдеуге болады. цитоскелет шиеленіс ретінде. Сонымен қатар, бүкіл табиғатта кездесетін геометриялық өрнектер (спираль ДНҚ, а-ның геодезиялық күмбезі волвокс, Бакминстерфуллерен, және басқалары) қосылыстардың, ақуыздардың өздігінен жиналуына шиеленісу принциптерін қолдану негізінде түсінілуі мүмкін,[11] және тіпті органдар. Бұл көзқарас тұрақтылықты сақтау және құрылымдық тұрақтылыққа қол жеткізу үшін кернеуліктің кернеу-қысу өзара әрекеттесуі материалды қалай азайтуға болатындығына негізделген.[12] Сондықтан, табиғи сұрыптау қысым, мүмкін, шиеленісті түрде ұйымдастырылған биологиялық жүйелерді қолдайды.
Ингбер түсіндіреді:
Бұл құрылымдардағы кернеулік элементтер - Фуллердің күмбездері болсын немесе Снельсонның мүсіндері болсын - көршілес мүшелер арасындағы ең қысқа жолдарды бейнелейді (демек, геодезиялық түрде орналасқан). Созылу күштері табиғи түрде екі нүктенің арасындағы ең қысқа қашықтыққа өтеді, сондықтан кернеулік құрылымының мүшелері стрессті ең жақсы көтеру үшін дәл орналасады. Осы себепті, шиеленіс құрылымдары максималды күш ұсынады.[10]
Эмбриологияда, Ричард Гордон ұсынды Эмбриондық дифференциация толқындары «дифференциалдау органелласы» арқылы таралады[13] қайда цитоскелет 'ұяшық күйін бөлгіш' деп аталатын клеткалардың апикальды ұшында биистелетін шиеленіс құрылымында жинақталған.[14]
Тарих

Tensegrity шығу тегі қайшылықты болып табылады.[16] Сияқты көптеген дәстүрлі құрылымдар жақтаудағы байдаркалар және шиджи, созылу және қысу элементтерін ұқсас түрде қолданыңыз.
1948 жылы суретші Кеннет Снелсон өзінің көркемдік ізденістерінен кейін өзінің инновациялық «X-бөлігін» шығарды Қара тау колледжі (қайда Бакминстер Фуллер және басқа жерлерде дәріс оқыды). Бірнеше жылдан кейін «тенгрессия» терминін ең танымал Фуллер енгізді геодезиялық күмбездер. Өзінің бүкіл мансабында Фуллер өзінің жұмысына созылғыш компоненттерді енгізіп көрді, мысалы, оның шеңберінде димаксия үйлер.[17]
Снельсонның 1948 жылғы жаңалығы Фуллерді бірден Снельсоннан мачтаны пайдалануға беруіне түрткі болды. 1949 ж. Фуллер жоғары деңгейге ие болды -икосаэдр технологияға сүйене отырып, ол және оның шәкірттері құрылымдарды тез дамытып, күмбез салуға технологияны қолданды. Уақытша үзілістен кейін Снельсон шиеленісті концентрацияларға негізделген мүсіндердің көп мөлшерін шығара бастады. Оның жұмысының негізгі бөлігі 1959 жылы маңызды көрмеден басталды Қазіргі заманғы өнер мұражайы орын алу. MOMA көрмесінде Фуллер мачтаны және басқа да жұмыстарды көрсетті.[18] Бұл көрмеде Снельсон Фуллермен және көрмені ұйымдастырушылармен мачтаны несиелеу туралы пікірталастан кейін, сонымен қатар бірнеше жұмыстарды витрин.[19]
Снельсонның ең танымал туындысы - оның биіктігі 18 метр Ине мұнарасы 1968 ж.
Орыс суретшісі Виатчеслав Колейчук шиеленісті идея бірінші ойлап тапты деп мәлімдеді Карлис Йоханссон (lv ), кеңестік авангард суретшісі Латыш орыс тілінің негізгі көрмесіне бірнеше еңбек сіңірген ұрпақ конструктивизм 1921 ж.[20] Колейчуктің талабы дәлелденді Мария Гоф 1921 жылғы конструктивті көрмесіндегі жұмыстардың бірі үшін.[21] Снельсон конструктивистерді өзінің жұмысына ықпал ретінде мойындады (сұрау?).[22] Француз инженері Дэвид Джордж Эммерих те Карлис Йоханссонның (және өнеркәсіптік дизайн идеялары) қалайша шиеленістің тұжырымдамаларын болжағандай болғанын атап өтті.[23]
Тұрақтылық
Кернеулік призмалары
Үш таяқшалы кернеулік құрылымы (үш жақты призма) «стержень» сығымдау элементінің берілген (жалпы) ұзындығы үшін (жалпы үшеуі бар) және созылу кабелінің берілген (жалпы) ұзындығы үшін қасиетке ие ( алты жиынтық) стержень ұштарын біріктіретін болса, құрылымның тұрақты пішінді ұстап тұруына себеп болатын шыбық шыңдарын көршілес штангалардың түптерімен байланыстыратын сіңірдің (жалпы) ұзындығы үшін белгілі бір мән бар. Мұндай құрылым үшін таяқшалардың шыңдары мен үшбұрыштардың түбінде пайда болатын үшбұрыштың бір-біріне қатысты 5π / 6 бұрышымен (радиан) айналатынын дәлелдеуге болады.[24]
Бірнеше 2 сатылы тенгрессиялық құрылымдардың тұрақтылығын («алдын-алу мүмкіндігі») Сұлтан және басқалар талдайды.[25]
Tensegrity icosahedra


Тереңтайлық икосаэдр геометриясына тікелей сәйкес келетін полиэдр деп аталады Джессеннің икосаэдрі. Оның сфералық динамикасы Бакминстер Фуллерді ерекше қызықтырды[26], кім оған сілтеме жасады кеңею-қысылу түрлендірулері джиттер қозғалысы ретінде тұрақты тепе-теңдік айналасында.[27]
Төменде тенгрессияға байланысты фигуралардың математикалық моделі келтірілген икосаэдр, бұл неліктен шексіз ұтқырлықпен тұрақты құрылыс екенін түсіндіріп.[28]
Бүйір ұзындығының кубын қарастырайық 2г., шығу тегіне бағытталған. Ұзындықты орналастырыңыз 2л әрбір куб бетінің жазықтығында, әр тіреу тұлғаның бір шетіне параллель және бетке центрленген болатындай етіп. Сонымен қатар, әр тіреу текшенің қарама-қарсы бетіндегі тірекке параллель, бірақ барлық басқа тіректерге ортогоналды болуы керек. Егер бір тіректің декарттық координаттары болса және , оның параллель тірегі сәйкесінше болады, және . Басқа тіреу ұштарының координаталары (төбелері) координаттарды ауыстыру арқылы алынады, мысалы, (кубтың бас диагоналіндегі айналу симметриясы).





Қашықтық с кез-келген екі төбенің арасында (0, г., л) және (г., л, 0) болып табылады

Берілген ұзындықтағы тіректерден салынған бұл суретті елестетіп көріңіз 2л және берілген ұзындықтағы сіңірлер (көршілес шыңдарды қосатын) с, бірге . Қатынас бізге екі мүмкін мән бар екенін айтады г.: біреуі тіректерді бір-біріне итеру арқылы, екіншісі оларды бөліп алу арқылы жүзеге асырылады. Мысалы, үшін минималды көрсеткіш (г. = 0) Бұл тұрақты октаэдр және максималды фигура (г. = л) Бұл квазирегулярлы кубеоктаэдр. Жағдайда Бізде бар с = 2г., сондықтан дөңес корпус туралы алтын коэффициент фигура () Бұл тұрақты икосаэдр. Политоптардың кинематикасы туралы ешқандай мақала а Коксетер анықтама, бұл жерде 1940 жылға дейін (дейін Джессеннің икосаэдрі немесе коктейлдің икосаэдрінің ашылуы) Коксетер бұған дейін көрсеткен болатын икосаэдрдің он екі шыңын октаэдрдің он екі шетін алтын қатынасы бойынша бөлу арқылы алуға болады, кубоктаэдрден октаэдрге дейінгі сегіз теңбүйірлі үшбұрыштан және он екі теңбұрышты үшбұрыштан тұратын жүздері бар (әдетте біркелкі емес) икозэдралардың үздіксіз серияларының бірі ретінде, осындай бөлу процесінде жасалуы мүмкін.[29]




Ерекше жағдайда екі шегі сәйкес келеді, және , демек, бұл фигура - тұрақты тенденция икосаэдрі.


Тенегрезиттік икосаэдр жоғарыдағы қатынастың экстремалды нүктесін білдіретіндіктен, оның шексіз ұтқырлығы бар: ұзындықтың шамалы өзгерісі с сіңірдің (мысалы, сіңірлерді созу арқылы) қашықтықтың 2 үлкен өзгеруіне әкеледіг. тіректер.
Патенттер
- АҚШ патенті 3.063.521 , «Созылғыш-тұтастық құрылымдары», 1962 ж. 13 қараша, Бакминстер Фуллер.
- Француз патенті № 1.377.290, «Construction de Reseaux Autotendants», 28 қыркүйек 1964 ж., Дэвид Джордж Эммерих.
- Француз патенті № 1.377.291, «Linéaires Autotendants Structures», 1964 ж. 28 қыркүйек, Дэвид Жорж Эммерих.
- АҚШ патенті 3 139 957 , «Аспалы ғимарат» (оны аспенция деп те атайды), 7 шілде 1964 ж., Бакминстер Фуллер.
- АҚШ патенті 3 169 611 , «Үздіксіз шиеленіс, үзіліссіз қысу құрылымы», 16 ақпан 1965 ж., Кеннет Снельсон.
- АҚШ патенті 3 866 366 , «Симметриялы емес кернеу-тұтастық құрылымдары», 18 ақпан 1975 ж., Бакминстер Фуллер.
Тереңдіктің негізгі құрылымдары

Қарапайым кернеулік құрылымы, 3-призма

Тағы бір 3-призма
Ұқсас құрылым, бірақ төрт қысу мүшесі бар

Карл Иогансонның прото-шиеленісті призмасы, 1921 ж[галерея 1]

Tensegrity Icosahedron, Бакминстер Фуллер, 1949[галерея 2]

Tensegrity Tetrahedron, Francesco della Salla, 1952 ж[галерея 3]

Tensegrity X-модулі тетраэдр, Кеннет Снелсон, 1959[галерея 4]

Кеннет Снелсон Ине мұнарасының көркем мүсіні.

Тарату, сағатына орнатылған сағаттық мүсіннің кернеулік құрылымын қоса алғанда AfrikaBurn, 2015, а Жанып тұрған адам аймақтық іс-шара

NASA SUPERball Tensegrity роботы - бұл қауіпсіздік жастығы жоқ басқа планетаға қонуға, содан кейін зерттеуге мобильді болуға арналған алғашқы прототип. Tensegrity құрылымы қонуға әсер ету күштерін сіңіретін құрылымдық сәйкестікті қамтамасыз етеді және қозғалыс кабельдің ұзындығын өзгерту арқылы қолданылады, 2014 ж.

Үйдің ауласында салынған бақ бақалары мен нейлон шпагаттарынан жасалған кернеу күмбезі, 2009 ж











{kind=link}
Сондай-ақ қараңыз
- Көпір - физикалық кедергілерді қамту үшін салынған құрылым
- Бұлт тоғыз, Бакминстер Фуллер атындағы алып аспандағы қалқымалы шиеленіс сфералары
- Гиперболоидтық құрылым
- Актерлер теориясының өзара байланысы
- Төбенің төбесі
- Ғарыш кеңістігі - үш өлшемді жүк көтергіш ферманың құрылымы
- Синергетика
- Кернеу
- Созылу құрылымы
- Жіңішке қабықшалы құрылым
Ескертулер
- ^ Гомес-Джарегуи 2010, б. 28. 2.1-сурет
- ^ Fuller & Marks 1960 ж, Cурет 270.
- ^ Fuller & Marks 1960 ж, Cурет 268.
- ^ Лалвани 1996 ж, б. 47
Әдебиеттер тізімі
- ^ Гомес-Джарегуи, V (2010). Tensegrity құрылымдары және олардың сәулетке қолданылуы. Servicio de Publicaciones Universidad de Cantabria. б. 19. ISBN 978-8481025750.
- ^ Swanson, RL (2013). «Биотенсегритет: остеопатикалық тәжірибеге, білімге және зерттеуге қосымшалармен биологиялық архитектураның біртұтас теориясы - шолу мен талдау». Американдық остеопатикалық қауымдастық журналы. 113 (1): 34–52. дои:10.7556 / jaoa.2013.113.1.34. PMID 23329804.
- ^ Элленор Хартли, «Кен Снелсон және құрылымның эстетикасы», Марлборо галереясының каталогында Кеннет Снельсон: Таңдалған жұмыс: 1948–2009, 19 ақпан мен 21 наурыз аралығында көрмеге қойылды.
- ^ Коркмаз және т.б. (Маусым 2011)
- ^ Коркмаз, Бел Хадж Али және Смит 2011
- ^ Холл, Лура (2 сәуір 2015). «Super Ball Bot». НАСА. Алынған 18 маусым 2020.
- ^ Левин, Стивен (2015). «16. Tensegrity, жаңа биомеханика». Хатсонда, Майкл; Уорд, Адам (ред.) Оксфордтың тірек-қимыл аппаратының оқулығы. Оксфорд университетінің баспасы. 155-6, 158-160 бб. ISBN 978-0-19-967410-7.
- ^ Соуза және т.б. 2009 ж
- ^ Левин, Стивен М. (1 қыркүйек 2002). «Tensegrity-ферма омыртқа механикасы үлгісі ретінде: биотенегралық». Медицина мен биологиядағы механика журналы. 02 (3n04): 375-388. дои:10.1142 / S0219519402000472. ISSN 0219-5194.
- ^ а б Ингбер, Дональд Э. (қаңтар 1998). «Өмір сәулеті» (PDF). Ғылыми американдық. 278 (1): 48–57. дои:10.1038 / Scientificamerican0198-48. PMID 11536845. Архивтелген түпнұсқа (PDF) 2005 жылғы 15 мамырда.
- ^ Эдвардс, Скотт А .; Вагнер, Йоханнес; Gräter, Frauke (2012). «Глобулярлы ақуыздағы динамикалық престресс». PLOS есептеу биологиясы. 8 (5): e1002509. Бибкод:2012PLSCB ... 8E2509E. дои:10.1371 / journal.pcbi.1002509. PMC 3349725. PMID 22589712.
- ^ Скелтон, Роберт (2016). «Жаһандық тұрақты минималды қысымды кернеу құрылымдары». Композициялық құрылымдар. 141: 346–354. дои:10.1016 / j.compstruct.2016.01.105.
- ^ Гордон, Н.К. және Гордон, Р. Эмбриондардағы дифференциалдау органелласы: жасуша күйі сплиттері [шақырылған шолу.] Теор. Биол. Мед. Үлгі. 13 (Арнайы шығарылым: Жасуша мінез-құлқының биофизикалық модельдері, қонақтың редакторы: Джек А. Тусзинский), №11. 2016 ж
- ^ Гордон, Ричард (1999). Иерархиялық геном және дифференциация толқындары. Математикалық биология мен медицинадағы сериялар. 3. дои:10.1142/2755. ISBN 978-981-02-2268-0.
- ^ Gough, Мария (көктем 1998). «Конструктивизм зертханасында: Карл Иогансонның суық құрылымдары». Қазан. 84: 90–117 б. Қараңыз. 109. дои:10.2307/779210. JSTOR 779210.
- ^ Гомес-Джарегуи, В. (2009). «Tensegrity-нің даулы бастаулары» (PDF). Халықаралық кеңістіктік құрылымдардың қауымдастығы IASS симпозиумы 2009 ж., Валенсия.
- ^ Fuller & Marks 1960 ж, Ч. Сезімталдық
- ^ Фуллердің осы көрмедегі жұмысының фотосуретін 1961 ж. Арналған кернеулер туралы мақаласынан қараңыз Портфолио және өнер жаңалықтары жылдық (№4).
- ^ Лалвани 1996 ж, б. 47
- ^ Дроиткур, Брайан (18 тамыз 2006). «Құрылыс блоктары». The Moscow Times. Архивтелген түпнұсқа 2008 жылғы 7 қазанда. Алынған 28 наурыз 2011.
Вячеслав Колейчук өнер мен ғылымның ерекше араласуымен 1921 жылы аңызға айналған конструктивтік өнер көрмесін қайта тірілтті.
- ^ Gough 1998, 90–117 бб
- ^ Снелсонның Лалвани үшін мақаласында, 1996 ж.
- ^ Дэвид Джордж Эммерих, Tendues et Autotendantes құрылымдары, Париж: Ecole d'Architecture de Paris la Villette, 1988, 30–31 б.
- ^ Бурхардт, Роберт Уильям, кіші (2008), Tensegrity дизайны бойынша практикалық нұсқаулық (PDF)
- ^ Сұлтан, Корнель; Мартин Корлесс; Роберт Э. Скелтон (2001). «Тереңдік құрылымдарының пресс-қысым проблемасы: кейбір аналитикалық шешімдер» (PDF). Қатты денелер мен құрылымдардың халықаралық журналы. 26: 145. мұрағатталған түпнұсқа (PDF) 23 қазан 2015 ж.
- ^ Фуллер, Р.Бакминстер (22 қазан 2010), Векторлық тепе-теңдік, алынды 22 ақпан 2019
- ^ Верхейен, Х.Ф. (1989). «Jitterbug трансформаторларының толық жиынтығы және олардың қозғалысын талдау». Қолданбалы компьютерлер және математика. 17, 1-3 (1–3): 203–250. дои:10.1016/0898-1221(89)90160-0.
- ^ «Tensegrity Figuren». Регенсбург университеті. Архивтелген түпнұсқа 26 мамыр 2013 ж. Алынған 2 сәуір 2013.
- ^ Коксетер, H.S.M. (1973) [1948]. «3.7 тұрақты және квази-регулярлы қатты денелердің төбелері үшін координаталар». Тұрақты политоптар (3-ші басылым). Нью-Йорк: Довер. 51-52 бет.
Библиография
- Фуллер, Р.Бакминстер (1982) [1975]. Синергетика: Ойлау геометриясындағы ізденістер. Мен. Макмиллан. ISBN 978-0-02-065320-2.
- — (1983) [1979]. Синергетика 2: Ойлау геометриясындағы қосымша зерттеулер. 2. Макмиллан. ISBN 978-0-02-092640-5. Желіде
- Фуллер, Бакминстер (1961). «Tensegrity». Портфолио және өнер жаңалықтары жылдық (4): 112–127, 144, 148.
- Фуллер, Р.Бакминстер; Маркс, Роберт В. (1973) [1960]. Бакминстер Фуллерінің Dymaxion әлемі. Анкерлік кітаптар. Суреттер. 261–280. ISBN 978-0385018043. Фуллердің көзқарасы бойынша шиеленіс ауқымына жақсы шолу және көбінесе мұқият атрибуттары бар алғашқы құрылымдарға қызықты шолу.
- Гомес-Джарегуи, Валентин (2007). Tensegridad. Estructuras Tensegríticas en Ciencia y Arte (Испанша). Сантандер: Универсидад де Кантабрия. ISBN 978-84-8102-437-1.
- Гомес-Джарегуи, Валентин (2010). Tensegrity құрылымдары және олардың сәулетке қолданылуы. Сантандер: Кантибрияның Университеті. ISBN 978-84-8102-575-0.
- Коркмаз, Синан; Бел Хадж Али, Низар; Смит, Ян Ф. (2011). «Tensegrity көпірінің бүлінуіне төзімділікті басқару жүйесін теңшеу». Инженерлік информатика. 26: 145. дои:10.1016 / j.aei.2011.10.002.
- Коркмаз, Синан; Бел Хадж Али, Низар; Смит, Ян Ф. (Маусым 2011). «Белсенді шиеленістің құрылымына зиянды төзімділікті бақылау стратегияларын анықтау» (PDF). Инженерлік құрылымдар. 33 (6): 1930–9. CiteSeerX 10.1.1.370.6243. дои:10.1016 / j.engstruct.2011.02.031. Архивтелген түпнұсқа (PDF) 2011 жылдың 29 қыркүйегінде.
- Лалвани, Хареш, ред. (1996). «Tensegrity бастаулары: Эммерих, Фуллер және Снельсонның көзқарастары». Халықаралық ғарыш құрылымдары журналы. 11 (1–2): 27–55. дои:10.1177/026635119601-204. S2CID 114004009.
- Хуан, С.Дж .; Tur, J M (шілде 2008). «Tensegrity шеңберлері: Статикалық талдау шолуы». Механизм және машина теориясы. 43 (7): 859–881. CiteSeerX 10.1.1.574.7510. дои:10.1016 / j.mechmachtheory.2007.06.010.
Әрі қарай оқу
Бұл мақалада жалпы тізімі бар сілтемелер, бірақ бұл негізінен тексерілмеген болып қалады, өйткені ол сәйкесінше жетіспейді кірістірілген дәйексөздер. (Наурыз 2009) (Бұл шаблон хабарламасын қалай және қашан жою керектігін біліп алыңыз) |
- Ди Карло, Биадио. «STRUTTURE TENSEGRALI». Quaderni di Geometria Sinergetica, Пескара 2004 ж. http://www.biagiodicarlo.com
- Эдмондсон, Эми. Толық түсіндірме, EmergentWorld LLC, 2007. Ертерек нұсқасы онлайнда қол жетімді https://web.archive.org/web/20031002084349/http://www.angelfire.com/mt/marksomers/40.html
- Forbes, Peter (2010) [2006]. «9. Басу және тарту жүйесі». Гекконың аяғы: ғалымдар табиғат кітабынан қалай жапырақ алады?. Харпер Коллинз. 197–230 бб. ISBN 978-0-00-740547-3.
- Ханаор, Ариэль (1997). «13. Тереңдік: теория және қолдану». Габриэльде Дж. Франсуа (ред.) Кубтан тыс: ғарыштық кадрлар мен полиэдраның сәулеті. Вили. 385–408 бб. ISBN 978-0-471-12261-6.
- Кеннер, Хью (1976). Геодезиялық математика және оны қалай қолдану керек. Калифорния университетінің баспасы. ISBN 978-0520029248. 2003 қайта басу ISBN 0520239318. Бұл шиеленістің математикасы мен құрылыс модельдерін білуге арналған жақсы орын.
- Масик, Миленко; Скелтон, Роберт Е .; Гилл, Филипп Э. (тамыз 2005). «Алгебралық шиеленістің формасын анықтау». Қатты денелер мен құрылымдардың халықаралық журналы. 42 (16–17): 4833–58. дои:10.1016 / j.ijsolstr.2005.01.014. Олар кез-келген керемет нәтиже ұсынады сызықтық түрлендіру тенгрессивтілік те - тенгрессия.
- Морган, Дж. (2003). «Тарихи шолу: вирустар, кристалдар және геодезиялық күмбездер». Биохимия ғылымдарының тенденциялары. 28 (2): 86–90. дои:10.1016 / S0968-0004 (02) 00007-5. PMID 12575996.
- Motro, R. (1992). «Tensegrity жүйелері: өнер жағдайы». Халықаралық ғарыш құрылымдары журналы. 7 (2): 75–84. дои:10.1177/026635119200700201. S2CID 107820090.
- Пью, Энтони (1976). Tensegrity туралы кіріспе. Калифорния университетінің баспасы. ISBN 978-0-520-03055-8. Архивтелген түпнұсқа 2008 жылғы 4 мамырда. Алынған 9 мамыр 2008.
- Снелсон, Кеннет (қараша 1990). «Р.Мотроға хат». Халықаралық ғарыш құрылымдары журналы.
- Соуза, Фалес Р .; Фонсека, Серджио Т .; Гонсалвес, Габриэла Г. Окарино, Джулиана М .; Манчини, Мариса С. (қазан 2009). «Табан буынындағы пассивті керілу арқылы анықталған престресс». Биомеханика журналы. 42 (14): 2374–80. дои:10.1016 / j.jbiomech.2009.06.033. PMID 19647832.
- Вильнай, Орен, Кабельдік торлар мен Tensegric қабықшалары: талдау және дизайн қосымшалары, Нью-Йорк: Ellis Horwood Ltd., 1990 ж.
- Ванг, Бин-Бин (1998). «Кабельді-тірек жүйелері: I бөлім - Tensegrity». Құрылымдық болатты зерттеу журналы. 45 (3): 281–9. дои:10.1016 / S0143-974X (97) 00075-8.
- Уилкен, Тимоти. Сыйлыққа деген сенімділікті іздеу, TrustMark, 2001 ж.
Сыртқы сілтемелер
- Tensegrity саласындағы ғылыми жарияланымдар Швейцария Федералды Технологиялық Институты (EPFL), Қолданбалы Есептеу және Механика Зертханасы (IMAC)
- Стивен Левиннің биотехникалық сайты Ортопедиялық хирургтің вирустардан омыртқалыларға дейінгі биологиялық құрылымдардың шиеленісті механикасы туралы бірнеше мақалалары.